


機器視覺對位中的常見模型與技術原理
在工業自動化領域,機器視覺對位技術是實現精密制造的核心環節,其本質是通過光學成像與算法解析,精確計算目標物體的位置和姿態偏差,并引導執行機構完成校正。根據應用場景的精度需求、物體尺寸和環境約束,業界發展出多種對位模型,主要可分為自對位模型和映射對位模型兩大類。

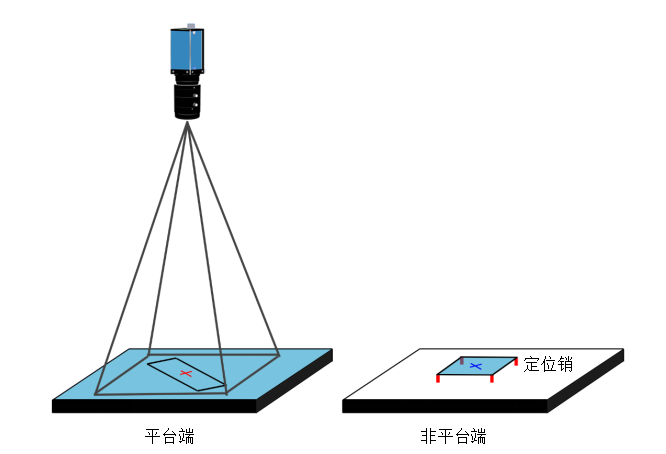
自對位模型:單相機高效定位
自對位模型通過機械定位確保目標物體位置固定,僅需在對象端(待調整物體)設置相機進行位置糾偏。其核心流程包括:示教模板位置→實時計算偏移量→機械糾偏→完成貼合。根據標記點(Mark點)數量與布局,主要分為以下類型:
1. 單Mark點模型
通過識別單個Mark點(通常為產品中心)計算平移偏移量,適用于小尺寸剛性物體或低精度場景,如小家電組裝。
2. 雙Mark點模型
識別物體長邊或對角線上的兩個Mark點,通過中點計算平移,連線計算旋轉角度,精度提升至±0.08mm。適用于角度敏感的電路板貼合。
3. 四Mark點模型
以矩形四角為Mark點,通過對角線交點和角度平均值計算位姿,精度達±0.05mm。常見于高精度要求的電子元件裝配。
4. 多相機擴展模型
針對大尺寸物體(如車載屏幕),采用雙相機或四相機協同,通過虛擬拼接實現全域定位,保持±0.05mm精度。絲印領域專用的抓邊模型(四/五相機)甚至可達±0.02mm,通過測量四條邊距實現直角/弧角屏幕的精密對位。
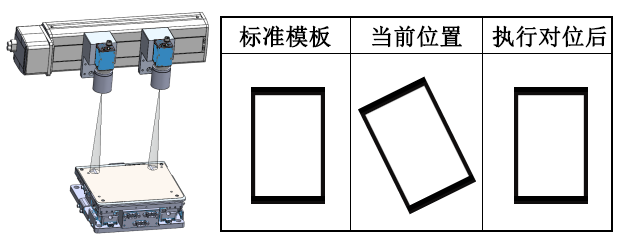
表:常見自對位模型性能對比

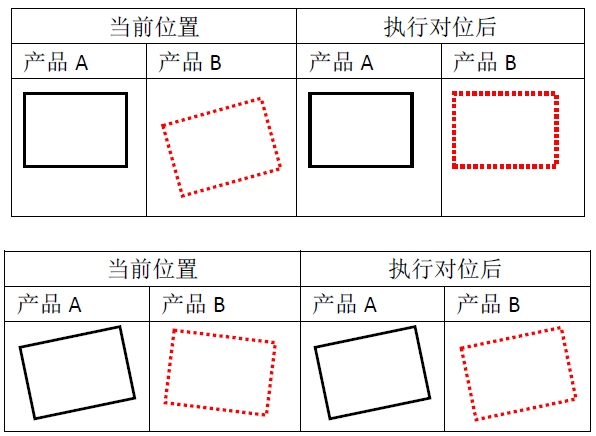
映射對位模型:動態坐標轉換
當目標端與對象端位置均不固定時,需采用映射對位模型。該模型通過多相機建立空間映射關系,將目標坐標轉換至對象坐標系:
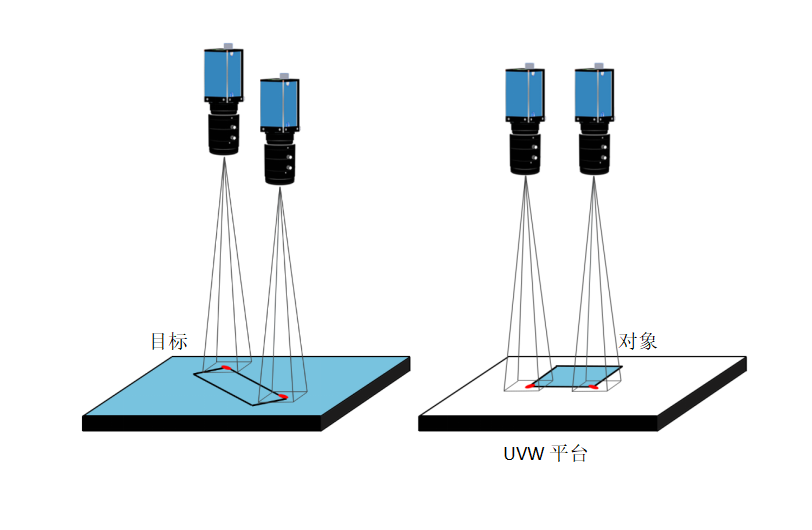
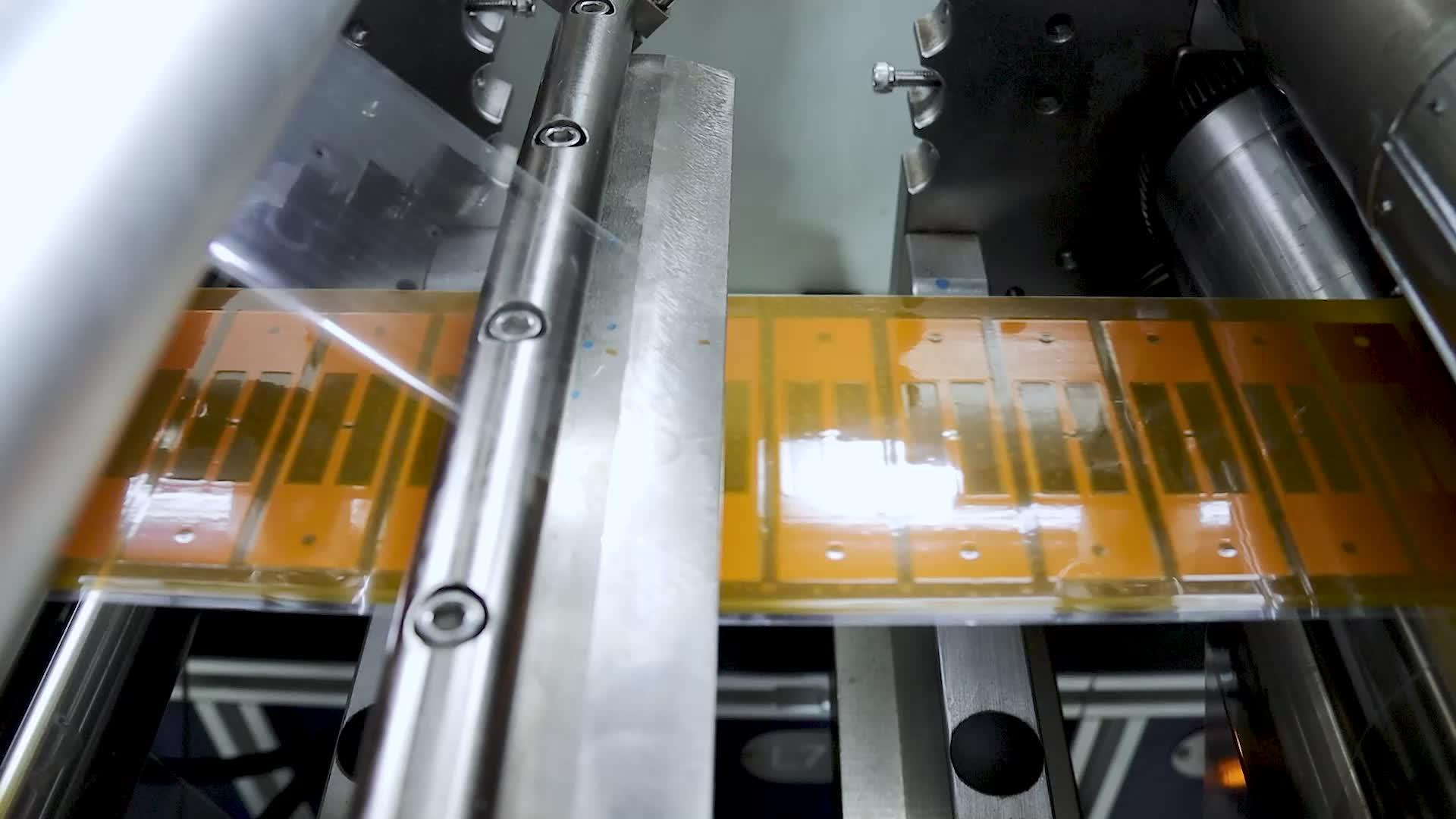
單目雙Mark映射:目標端與對象端各設一個相機,通過Mark點角度差計算偏移,精度±0.05mm,適用于FPC與鋼片貼合。
多Mark模型:如八Mark映射(四相機方案),通過四個角點建立映射關系,支持>200mm大尺寸產品(如汽車儀表盤),精度±0.05mm。
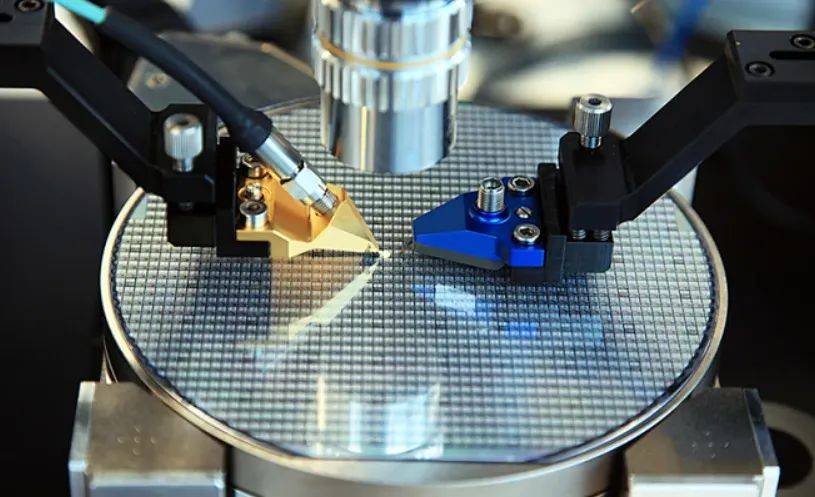
機器視覺對位技術已滲透至高端制造全鏈路:在半導體領域,雙CCD與UVW平臺組合實現微米級對準;在折疊屏產線,多相機抓邊模型確保轉軸區銀漿的高精度印刷;未來趨勢聚焦于多模態融合與自適應學習:結合深度學習預測材料形變,實現熱膨脹實時補償;通過強化學習優化匹配路徑,如分級匹配算法將粗匹配時間縮短40%,精匹配精度提升至99.5%。隨著算法與硬件的協同進化,機器視覺對位技術將持續推動精密制造向“零缺陷”目標邁進。




 投訴建議
投訴建議
提交
機器視覺引導跑臺式絲印機的應用

機器視覺的陶瓷片定位抓取應用
機器視覺的RFID電子標簽模切應用
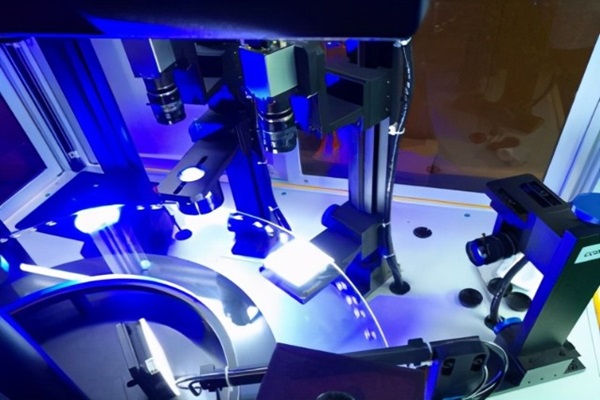
機器視覺中明場檢測與暗場檢測的區別解析

機器視覺檢測系統的影響因素解析