


從技術突破到場景適配,Elmo如何應對人形機器人商業化落地核心問題?
導語
當前,人形機器人已經處在技術突破與商業化落地的臨界點,即將迎來新一輪發展周期。如何通過技術創新在這輪周期中搶占先機,并形成產業優勢,成為全球人形機器人產業共同追求的目標。
Elmo作為全球運動控制領域的領導者,始終致力于為客戶提供卓越的整體運動控制解決方案。針對人形機器人市場的獨特需求,Elmo憑借30余年的深厚技術積淀,為人形機器人提供精準、高效、穩定、智能的運動控制解決方案。
埃莫運動控制技術(上海)有限公司總經理陳偉博士在2025年世界機器人大會接受采訪時表示:作為人形機器人核心零部件供應商,面對國內人形機器人產業的蓬勃發展及其在應用層面的持續深化,Elmo將繼續發揮在運動控制領域的領導力,為國內人形機器人客戶提供更具競爭力的前沿控制器和驅動器產品。

本次訪談中,面對人形機器人的商業化落地發展現狀,陳偉博士直指問題關鍵,并重點分享Elmo的產業洞察及解決方案。
技術突破
從“機械執行”到“智能交互”全面升級人形機器人想要真正商業化落地,融入物理世界,除了需要具備人類般的思考能力,還必須能夠像人類一樣行動自如。相較于傳統工業機器人,人形機器人對運動控制提出了截然不同的要求:更加輕量化、分布式、高功率密度、高響應頻率,以及智能化的全面升級。
陳偉博士表示,埃莫推出的新一代Titanium系列產品,采用氮化鎵開關技術,可以使開關頻率更高,恰好匹配了人形機器人關節對快速響應的需求。而嵌入式設計則將控制單元直接集成于機械臂內部,從物理層面解決了移動設備的負重難題,這正是人形機器人運動控制技術的核心突破點。

Titanium Maestro-新一代運動控制器
人形機器人需要與人類互動、自主移動,除零部件適配外,更強調算法的安全性與協同性,要求從“機械執行”到“智能交互”全面升級。
Titanium系列驅動器內置安全計算模塊,無需依賴中央控制器,可自主實現安全保護功能,滿足人形機器人與人身防護相關的場景需求。驅動器的算法結構支持多軸協同,能實現機器人不同部位的動作配合,保障行走、平衡等復雜動作的穩定性,適配人形機器人對肢體協同的核心需求。

場景分化
面對不同需求的精準適配
當技術突破遇上多元需求,場景分化成為必然。人形機器人是一個高度復雜的系統,其不同部位對運動控制性能的要求差異顯著,這就要求驅動器產品必須在功率密度、響應速度、集成體積和扭矩輸出等維度上實現精準匹配。
在機器人下肢等需要大扭矩、高功率密度的場景中,埃莫50A、70A乃至140A的高電流驅動器展現出獨特優勢,超高的功率密度可以讓機器人在負重行走時仍能保持靈活與穩定。
與之相對,手部關節等輕量場景更注重柔性與感知能力,埃莫的Titanium系列同樣可以憑借體積及技術優勢,靈活集成于手部等狹小空間,滿足輕量化、快速響應、精準靈活的設計需求。
未來圖景
民用級與特種機器人的雙增長極
我國擁有全球最長的產業鏈及豐富的應用場景,正在成為全球人形機器人落地應用的最佳實驗場。展望未來,中國人形機器人產業將呈現“雙軌并行”的發展路徑:一是民用級服務機器人,依托中國制造業與供應鏈優勢,有望誕生多個獨角獸企業;二是特種行業機器人,如消防、電力、醫療等,預計將呈指數級增長。
陳偉博士表示:針對不同行業的客戶,Elmo已經做好了充分的技術儲備,并在技術支持和售后服務等方面全面布局,致力于為國家機器人產業的蓬勃發展提供堅實助力。




 投訴建議
投訴建議
提交
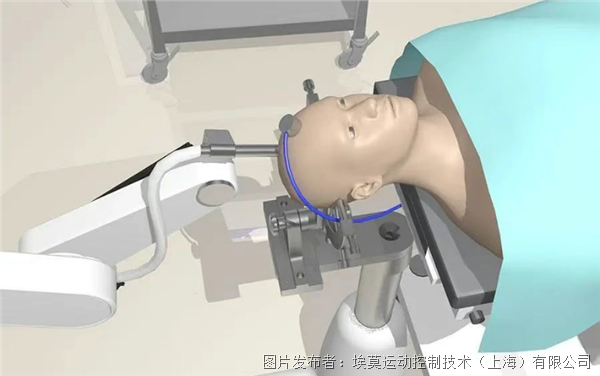
Elmo微案例 | 機器人做神經外科手術!如何實現“微米級”精準控制?
如何驚艷全場?Elmo以“創新+經典”雙輪驅動定義機器人運動控制新高度

小莫星品|安全之選!Platinum Harmonica高功率密度伺服驅動器
微案例 | Elmo如何助力生命科學企業打造核心競爭力?
案例 | Elmo如何助力生命科學企業打造核心競爭力?