


別碰這些陷阱!閉環系統辨識,教你挖出高精度模型
Q:工業控制與自動化領域中建模的核心技術是什么?
A:系統辨識(System Identification)。
Q:為什么在反饋控制(閉環)場景下辨識任務變得尤為復雜?
A:因為不僅需要克服噪聲干擾,還需解決閉環耦合效應帶來的辨識偏置。
Q:本文可以為你帶來什么?
A:深入探討閉環辨識的關鍵技術和陷阱,助你在強反饋環境下“挖出”高精度模型。
Part.1
閉環辨識vs開環辨識:核心差異

(閉環系統)

(閉環&激勵系統)
閉環辨識的獨特性
01
數據相關性
輸入信號與輸出噪聲因反饋存在統計相關性,導致傳統開環最小二乘法失效。
數學表達:閉環系統中,輸入輸出關系可寫為:

其中控制器滿足:

02
可辨識性條件
閉環系統需滿足持續激勵(Persistent Excitation)條件。
不加激勵會怎么樣?
若設定值set=0,干擾interference=0

若無激勵計算結果其實和模型一點關系沒有。
持續激勵的數學本質是什么?
閉環系統的輸入信號需滿足:
1、 頻譜充要條件
輸入信號功率譜

(在系統頻帶內非零),且覆蓋被控對象的關鍵頻段。
2、秩條件(針對參數化模型)
對模型階次 ,輸入信號需使數據矩陣滿秩:

激勵信號加在哪里?
設定值(Reference, r(t))
激勵信號r(t)經過控制器C后再進入被控對象G(低頻激勵會被積分控制抑制)。
1. 在參考信號中加入斜坡分量補償
2. 臨時降低控制器積分增益(實驗后復原)
控制量(Controller Output, u(t))
激勵信號r(t)繞過控制器直接作用到被控對象G。大幅擾動可能損壞執行器,執行器有足夠安全裕度。
激勵的本質是用最小的擾動代價換取最大的信息量!
Part.2
高精度閉環辨識的關鍵環節
模型集選擇(Model Set)
01
ARX模型
(工程上易用但需考慮降階):

02
BJ模型
(分離過程/噪聲模型):

計算方法:克服閉環偏置的核心算法
01
直接辨識法(Direct Identification)
直接使用閉環數據,但需采用輔助變量(IV)或預測誤差法(PEM)消除偏置。
02
預測誤差法(PEM)目標函數

其中預測誤差如下:

03
間接辨識法(兩步法)
辨識閉環控制器模型

反推被控對象模型

適用場景:控制器已知且線性時不變(LTI)系統。
噪聲模型辨識:精度提升的勝負手
閉環系統中噪聲需精確建模,否則將導致參數方差過大。公式如下:

Part.3
避免“掉坑”
若控制器帶寬過高(如PID強積分),可能導致低頻激勵不足→模型低頻段可信度低。
在閉環場景下完成辨識任務,核心在于克服反饋耦合與噪聲干擾的雙重挑戰,精準“抓取”被控對象的真實動態。通過精心設計持續激勵信號、選用適配的模型結構(如BJ、ARX)、并運用偏置算法(如PEM、IV)消除閉環影響,方能突破傳統局限,在強反饋環境下挖掘出高精度的可靠模型,為先進控制奠定堅實基礎。




 投訴建議
投訴建議
提交
半導體人的硬核隊友,穩了!
青銅退散!效率飆升500%,直接帶你上王者
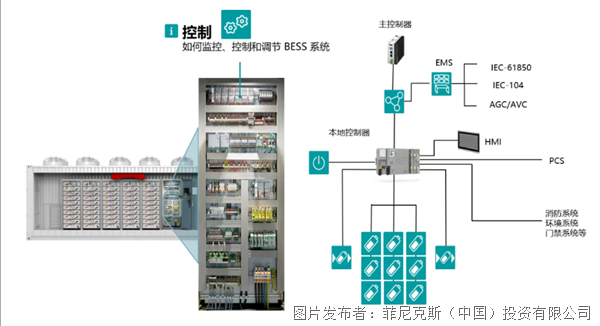
如何破解“看天吃飯”魔咒,讓綠電“風光無限”?
新品速遞|菲尼克斯電氣TB-EE-DB大電流分線端子來了,工業黨這波必須沖!
新能源人速進!直流微網HDC開關,三大核心buff疊滿