


解決方案 | AI+3D視覺引導(dǎo)周轉(zhuǎn)箱/料箱拆垛,大幅提升物流效率

緊密貼合的周轉(zhuǎn)箱正面&底面
點(diǎn)云圖及識(shí)別結(jié)果圖,Mech-Eye DEEP @ 2 m
01

周轉(zhuǎn)箱/料箱為塑料材質(zhì),側(cè)壁厚度在2-8 mm不等;長(zhǎng)期循環(huán)使用易變形,一致性差。對(duì)3D視覺系統(tǒng)精度及適應(yīng)性要求高。 箱內(nèi)多種物料亂序堆疊,可能存在內(nèi)容物反光、外溢等情況,對(duì)視覺識(shí)別造成干擾。 抓取策略(如:外夾、內(nèi)勾、拖拽式抓取等)需適應(yīng)箱體側(cè)壁的復(fù)雜結(jié)構(gòu)。
02

來料箱體緊密貼合。部分場(chǎng)景,不同大小的周轉(zhuǎn)箱混合堆垛,視覺系統(tǒng)需準(zhǔn)確識(shí)別箱體長(zhǎng)、寬,提前調(diào)節(jié)夾具行程。 來料垛型不一致、箱體一致性差,機(jī)器人拆垛的方式精度低、效率低。
03
存在同一機(jī)器人應(yīng)對(duì)多個(gè)工位、廠房頂高限制和機(jī)器人臂展不足等情況,需合理規(guī)劃3D相機(jī)安裝方式。 現(xiàn)場(chǎng)布局緊湊、對(duì)抓取順序要求嚴(yán)格,視覺系統(tǒng)需具備抓取規(guī)劃、路徑規(guī)劃、碰撞檢測(cè)等能力。 存在陽光、燈光等環(huán)境光干擾,需要3D相機(jī)具備優(yōu)異的抗環(huán)境光性能。
解決方案及優(yōu)勢(shì)
01
方案構(gòu)成

周轉(zhuǎn)箱/料箱運(yùn)輸?shù)轿唬?a style='color: blue;display:inline;border:none;' target='_blank' href='http://www.hzchechuang.cn/plc/' onclick="HitLog('PLC','http://www.hzchechuang.cn/plc/')" >PLC/機(jī)器人告知視覺系統(tǒng)進(jìn)行拍照。
Mech-Eye對(duì)最高層箱體進(jìn)行拍照,生成完整、細(xì)致、清晰的點(diǎn)云數(shù)據(jù);Mech-Vision對(duì)點(diǎn)云進(jìn)行處理(點(diǎn)云預(yù)處理、模板匹配、位姿矯正等),輸出位姿,并根據(jù)需求進(jìn)行箱體尺寸計(jì)算、垛型校驗(yàn);Mech-Viz獲取箱體位姿,進(jìn)行碰撞檢測(cè)、規(guī)劃抓取,引導(dǎo)機(jī)器人執(zhí)行拆垛作業(yè)。
直到整垛拆完,視覺系統(tǒng)上報(bào)拆垛完成信號(hào),等待加料。
02
無懼各類復(fù)雜環(huán)境 成像清晰完整
先進(jìn)的成像算法,Mech-Eye在典型廠房環(huán)境光干擾下(15000 lx-20000 lx),能夠?qū)Ρ诒〉闹苻D(zhuǎn)箱/料箱高質(zhì)量成像。 Mech-Eye多種型號(hào),支持遠(yuǎn)/中/近不同工作距離;體積緊湊,滿足復(fù)雜多樣的安裝環(huán)境。梅卡曼德能夠根據(jù)實(shí)際工況為客戶提供契合的3D相機(jī)及安裝方案。確保相機(jī)視野完整覆蓋拍照區(qū)域,點(diǎn)云清晰完整。

依據(jù)現(xiàn)場(chǎng)情況,將相機(jī)安裝于支架上,保證視野,柔性搬運(yùn)
先進(jìn)AI算法 應(yīng)對(duì)各種來料形態(tài)
先進(jìn)點(diǎn)云處理算法,快速準(zhǔn)確輸出箱體位姿,引導(dǎo)機(jī)器人精準(zhǔn)抓取。 性能強(qiáng)大的機(jī)器視覺軟件,內(nèi)置AI算法可應(yīng)對(duì)緊密貼合、一致性差、底面朝上的箱體。內(nèi)容物反光、外溢等情況亦不影響識(shí)別。
智能程度高 物料周轉(zhuǎn)更穩(wěn)定
可根據(jù)來料垛型,智能規(guī)劃抓取順序及單次抓取數(shù)量。
智能碰撞檢測(cè)及運(yùn)動(dòng)軌跡規(guī)劃,更好應(yīng)對(duì)現(xiàn)場(chǎng)布局緊湊等問題,提升廠內(nèi)物料流通穩(wěn)定性。
精確識(shí)別箱體長(zhǎng)、寬,根據(jù)識(shí)別結(jié)果計(jì)算箱體尺寸,調(diào)節(jié)夾具行程;多抓時(shí),視覺系統(tǒng)對(duì)箱體間距進(jìn)行判斷,小于設(shè)定閾值時(shí)報(bào)警,避免碰撞發(fā)生。

箱體間距判斷
應(yīng)用實(shí)例
某大型汽配廠 | 3D視覺引導(dǎo)周轉(zhuǎn)箱拆垛

案例現(xiàn)場(chǎng)

3D相機(jī)及安裝方式:Mech-Eye LSR L,臂載式安裝。
滿垛尺寸:1200×1260×1470 mm(長(zhǎng)×寬×高)。
項(xiàng)目亮點(diǎn):
能夠?qū)Ρ诒 ⒕o密貼合的周轉(zhuǎn)箱輸出精準(zhǔn)位姿。 箱內(nèi)存在高亮反光工件亦不影響識(shí)別。 拖拽式抓取,更好應(yīng)對(duì)箱體緊密貼合、內(nèi)壁光滑的情況。

Mech-Eye DEEP大視野,大景深,支持現(xiàn)場(chǎng)2.4 m的超高垛型。
深度學(xué)習(xí)算法可應(yīng)對(duì)周轉(zhuǎn)箱壁薄、緊密貼合、箱內(nèi)零件干擾等情況。
可應(yīng)對(duì)不同時(shí)段、不同強(qiáng)度的環(huán)境光干擾。




 投訴建議
投訴建議
提交
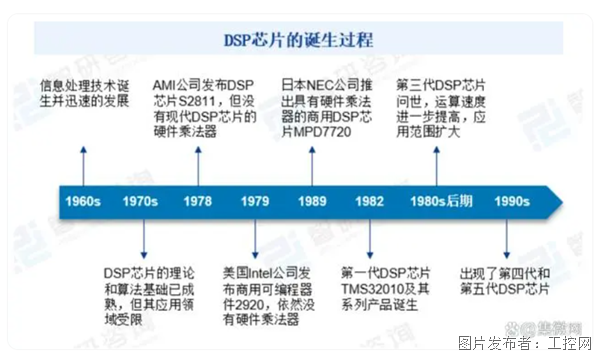
DSP應(yīng)用市場(chǎng)的大蛋糕,國(guó)產(chǎn)廠商能吃下多少?

智能工控+存儲(chǔ)-星火存儲(chǔ)打造智慧存儲(chǔ),助力產(chǎn)業(yè)創(chuàng)新

智能工控+存儲(chǔ)-金勝電子煥新品牌助力國(guó)產(chǎn)工控市場(chǎng)
應(yīng)對(duì)人工智能數(shù)據(jù)中心的電力挑戰(zhàn)

?Saab UK 為深海勘探實(shí)現(xiàn)創(chuàng)新,降低潛水員及環(huán)境風(fēng)險(xiǎn)