


智能制造的空間度量:機(jī)器視覺(jué)標(biāo)定技術(shù)解析
今天咱們來(lái)聊機(jī)器視覺(jué)的關(guān)鍵技術(shù)——視覺(jué)標(biāo)定。就像你新買(mǎi)的眼鏡需要驗(yàn)光師調(diào)試一樣,當(dāng)相機(jī)裝上工業(yè)機(jī)器人或者自動(dòng)化設(shè)備時(shí),也得先經(jīng)過(guò)這套"視力矯正"流程。想象下,如果機(jī)器把1厘米看成2厘米,那裝配零件時(shí)絕對(duì)會(huì)引發(fā)災(zāi)難現(xiàn)場(chǎng)對(duì)吧?
先說(shuō)個(gè)有意思的現(xiàn)象:人類(lèi)嬰兒其實(shí)也要經(jīng)歷類(lèi)似的"視覺(jué)標(biāo)定"。研究發(fā)現(xiàn),新生兒需要6-8個(gè)月才能準(zhǔn)確判斷物體距離,這個(gè)過(guò)程和機(jī)器視覺(jué)的標(biāo)定原理驚人相似。不過(guò)機(jī)器的學(xué)習(xí)速度可比人類(lèi)寶寶快多了,通常只需要幾分鐘到幾小時(shí)就能完成。

一、標(biāo)定的核心三要素
現(xiàn)在咱們拆解下標(biāo)定的核心三要素:鏡頭畸變、坐標(biāo)系轉(zhuǎn)換和像素當(dāng)量。
鏡頭畸變
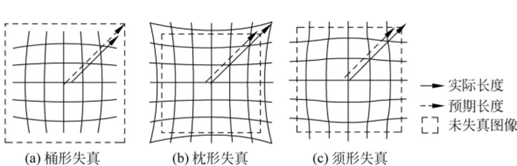
相機(jī)鏡頭并非理想的光學(xué)元件,其制造工藝與組裝偏差會(huì)導(dǎo)致兩類(lèi)典型畸變:徑向畸變與切向畸變。鏡頭徑向畸變就像哈哈鏡效果,廣角鏡頭尤其明顯——直線變曲線,圓形成橢圓。切向畸變則源于鏡頭與圖像平面的微小傾斜,導(dǎo)致畫(huà)面局部拉伸或壓縮。這些畸變會(huì)使直線變彎、尺寸失真,直接影響測(cè)量精度。
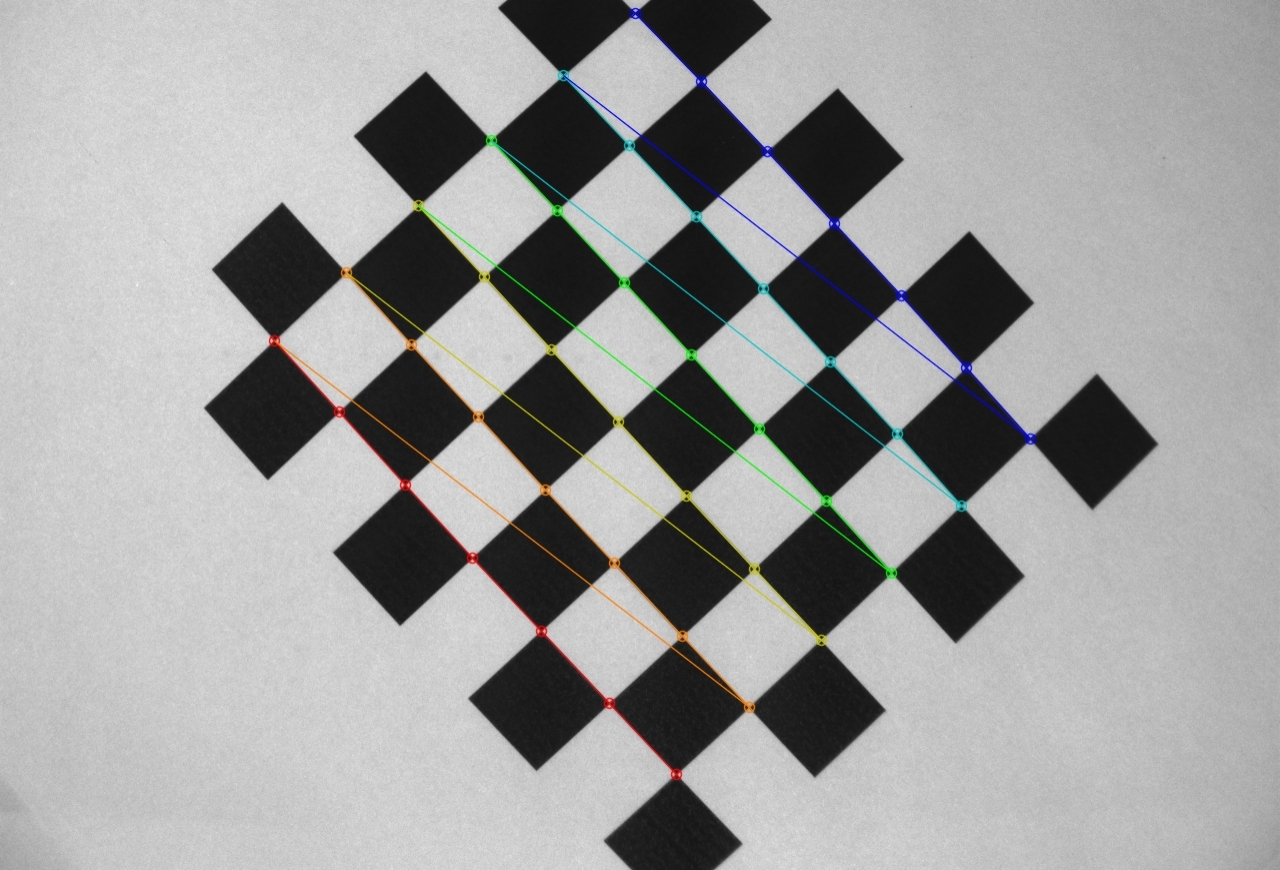
工程師們一般用棋盤(pán)格標(biāo)定板來(lái)解決這個(gè)問(wèn)題。當(dāng)相機(jī)從不同角度拍攝棋盤(pán)格照片后,算法就能反向推算出畸變參數(shù)。
坐標(biāo)系轉(zhuǎn)換
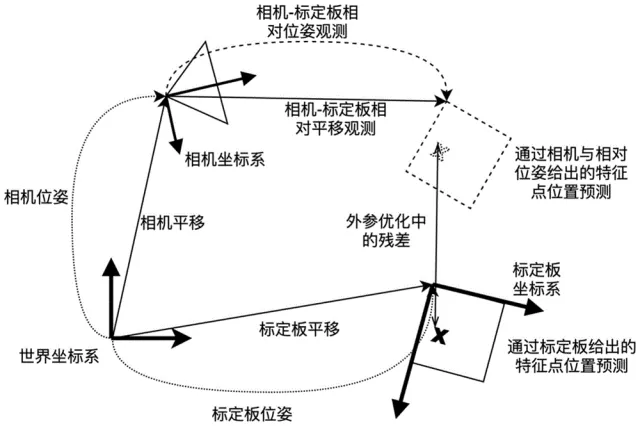
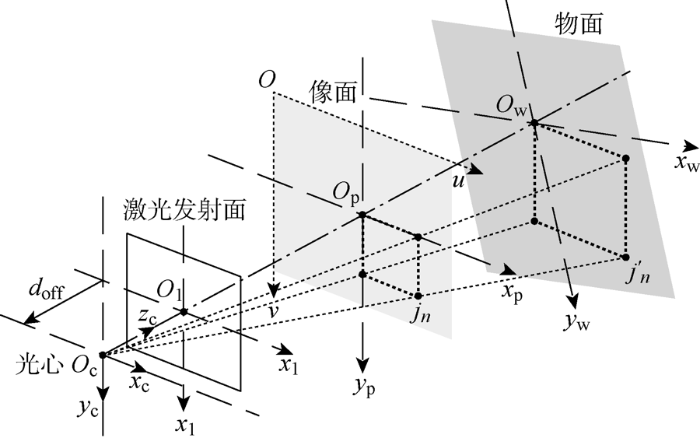
坐標(biāo)系轉(zhuǎn)換的本質(zhì)是像素坐標(biāo)系(圖像中的像素位置)、成像平面坐標(biāo)系(鏡頭映射的物理平面)、相機(jī)坐標(biāo)系(相機(jī)自身的三維空間)與世界坐標(biāo)系(物體實(shí)際位置)之間的數(shù)學(xué)轉(zhuǎn)換關(guān)系。比如機(jī)械臂上的相機(jī)看到零件的位置,需要轉(zhuǎn)換成機(jī)器人底座坐標(biāo)系的坐標(biāo)。
像素當(dāng)量
像素當(dāng)量則是建立虛擬和現(xiàn)實(shí)的丈量標(biāo)準(zhǔn)。通過(guò)已知尺寸的標(biāo)定板,算法能計(jì)算出每個(gè)像素代表多少毫米。這個(gè)參數(shù)會(huì)直接影響測(cè)量精度,比如檢測(cè)手機(jī)屏幕劃痕時(shí),1個(gè)像素的誤差可能就意味著0.02毫米的誤判。現(xiàn)在頂級(jí)工業(yè)相機(jī)的標(biāo)定精度能達(dá)到亞像素級(jí)別,相當(dāng)于能在足球場(chǎng)上識(shí)別出一根頭發(fā)絲的粗細(xì)。
二、標(biāo)定方法
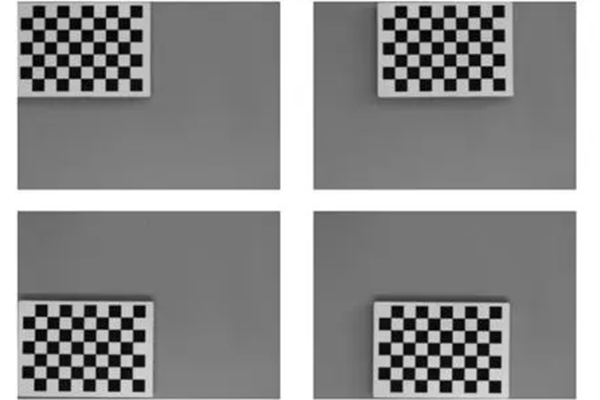
傳統(tǒng)標(biāo)定法 以棋盤(pán)格標(biāo)定板為例,通過(guò)拍攝不同角度的標(biāo)定板圖像,提取角點(diǎn)坐標(biāo),結(jié)合已知的方格物理尺寸,可計(jì)算出相機(jī)的內(nèi)外參數(shù)。該方法精度可達(dá)亞像素級(jí),但需拍攝至少15組圖像,且對(duì)標(biāo)定板平整度、光照條件要求嚴(yán)格。
主動(dòng)視覺(jué)標(biāo)定法 無(wú)需標(biāo)定物,但要求相機(jī)按預(yù)設(shè)軌跡運(yùn)動(dòng)(如平移、旋轉(zhuǎn))。通過(guò)分析運(yùn)動(dòng)過(guò)程中圖像特征點(diǎn)的變化,結(jié)合已知位移數(shù)據(jù),可反推出相機(jī)參數(shù)。例如,控制機(jī)械臂攜帶相機(jī)做圓周運(yùn)動(dòng),利用特征點(diǎn)軌跡的圓心與半徑,可求解相機(jī)的旋轉(zhuǎn)與平移參數(shù)。該方法適用于無(wú)法放置標(biāo)定物的場(chǎng)景但需高精度運(yùn)動(dòng)控制平臺(tái),成本較高。
自標(biāo)定法
利用圖像中的自然幾何特征(如平行線、消失點(diǎn))或場(chǎng)景結(jié)構(gòu)(如建筑物邊緣)計(jì)算相機(jī)參數(shù)。例如,通過(guò)檢測(cè)多張圖像中的平行線交點(diǎn)(消失點(diǎn)),可推導(dǎo)出相機(jī)的主點(diǎn)坐標(biāo)與焦距。該方法靈活性強(qiáng),但依賴(lài)環(huán)境特征,穩(wěn)定性低于傳統(tǒng)標(biāo)定法。
總的來(lái)說(shuō),標(biāo)定過(guò)程就像給機(jī)器做全身體檢:先調(diào)整光圈焦距避免過(guò)曝(就像我們瞇眼看強(qiáng)光),再用標(biāo)定法計(jì)算內(nèi)參(鏡頭的"近視度數(shù)"),最后通過(guò)手眼標(biāo)定確定外參("脖子"和"身體"的連接關(guān)系)。最終確保看到的畫(huà)面嚴(yán)絲合縫。

三、視覺(jué)標(biāo)定精度驗(yàn)證
同時(shí),在標(biāo)定過(guò)程中也需要注意現(xiàn)場(chǎng)環(huán)境條件,不然在精度驗(yàn)證環(huán)節(jié)很容易翻車(chē)。比如標(biāo)定時(shí)沒(méi)注意環(huán)境溫濕度變化,結(jié)果早上合格的系統(tǒng)下午就"老花眼"了。所以現(xiàn)在高端方案都會(huì)加入溫度補(bǔ)償算法,就像給相機(jī)戴了恒溫護(hù)目鏡。另外震動(dòng)也是隱形殺手,需要采用防震支架,否則流水線因?yàn)閭魉蛶Ф秳?dòng)導(dǎo)致標(biāo)定失效。
在智能制造浪潮中,視覺(jué)標(biāo)定技術(shù)正朝著更高精度、更快速度、更強(qiáng)適應(yīng)性的方向發(fā)展。從精密裝配到自動(dòng)駕駛,機(jī)器視覺(jué)標(biāo)定技術(shù)如同工業(yè)世界的"空間度量",確保著虛擬像素與物理現(xiàn)實(shí)的精確對(duì)應(yīng)。這項(xiàng)看似基礎(chǔ)的技術(shù),實(shí)則是智能制造大廈的基石。




 投訴建議
投訴建議
提交

如何提高機(jī)器視覺(jué)測(cè)量精度?
機(jī)器視覺(jué)對(duì)位印刷加工PCB板應(yīng)用

視覺(jué)系統(tǒng)工控顯示屏選型指南
機(jī)器視覺(jué)的半導(dǎo)體封裝應(yīng)用

機(jī)器視覺(jué)的食品包裝貼標(biāo)應(yīng)用