


雙極性步進電機(下):微步進與衰減模式
概述
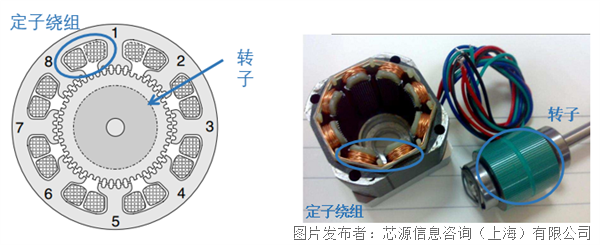
在本系列的上一篇文章中,我們介紹了雙極性步進電機的三種控制模式及其機械結構,其中包括雙全橋驅動器。本文將討論雙極性步進電機的微步進模式,以及它如何控制雙全橋驅動器。
微步進
半步步進模式作為單相步進和整步步進的結合,可以獲得更多的電氣角度位置。而微步進則增加了更多的中間角度位置,實現了更精細的步進。
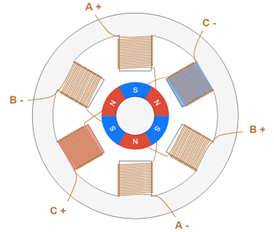
圖 1 顯示了微步進的八個細分角度。它將單相步進的90°電角分為八等份,分別代表八個電流位置。每個位置的電流都是A相繞組和B相繞組的電流合成矢量。合成矢量的幅度始終為 1。

每個位置的電流都需要分別投射到A相和B相上,以獲得相應控制值(見表1)。

A相和B相電流可以根據表1中的相應值進行控制。通過對電流的控制,可以實現在相應角度合成A相與B相的電流矢量。
在八個分段(或階躍)的控制下,雙極性步進電機的電流已經類似于正弦波(見圖 2)。 如果階躍更多,通過雙極性步進電機繞組的電流將更加趨近于標準正弦波。正弦電流波形可以減小電機輸出的扭矩脈動,并在空中形成圓形旋轉磁場,從而提高步進電機的旋轉穩定性。

帶衰減模式的電流調節
慢速衰減和快速衰減是用來穩定每一步階躍電流的典型控制方法。以 A 相上的單個階躍為例,其電流調節波形如圖 3 所示。電流調節功能通過控制四個 MOSFET 的導通/關斷來實現,這四個 MOSFET由 A 相的全橋驅動器驅動。
下面將詳細討論這兩種衰減模式。

慢速衰減
當 Q1 和 Q4 導通時,電源電壓 (U) 被施加到 A 相繞組上,電流開始上升。在相應等效電路中,R為繞組電阻,L為電感(具有等效阻抗),E為轉子運動磁場在繞組中產生的反電動勢EMF(見圖4)。反向電動勢作用在繞組電路上。
一旦電流達到所需值,就必須降低電流;否則,電流可能會持續增加并超過其設定值。此時,電流需要慢速衰減。
圖4 顯示了 A 相全橋驅動的慢速衰減過程。

關斷 Q1 并導通 Q2(忽略死區時間)將進入慢速衰減。 它相當于將A相繞組短路。由于電流通過繞組電感,電流方向不會突然改變,而且電流在低側的兩個MOSFET中形成環流。此時只有反電動勢(E)作用于電路,電流受反向壓降(-E)的影響開始下降。如果忽略電阻引起的壓降,電流將以E/L的速度減小。
電流下降一段時間之后,Q2 關斷,Q1 導通,電流得以再次上升。這個過程穩定了每一步階躍的電流。
快速衰減
當電流即將進入需要較低電流的階躍時,電流需要進一步下降。如果電流下降得不夠快,則慢速衰減的速度可能不足以將電流降低到所需的水平。此時就需要快速衰減(見圖 5)。

在快速衰減期間, Q2 和 Q3 在Q1 和 Q4 關斷(忽略死區時間)之后導通。此時,電源電壓反向施加在 A 相繞組上并與反電動勢 (E) 串聯。電流從Q2流向Q3,因為流經繞組電感的電流不會突然變化。電流以(E + U) / L的速度下降,下降速度比慢速衰減要快。
不同電流控制的比較
當電流下降到下一個階躍的設定值時,電流調節方案可以從快速衰減變為慢速衰減。組合使用慢速衰減和快速衰減可以控制電流快速變化,與此同時還能最大限度地減少電流紋波。圖 6 顯示了快速衰減、慢速衰減以及組合模式下的電流波形(電流波形顯示為綠色)。

在慢速衰減期間,電流在下降到下一個階躍之前會在較長的時間內一直下降,這會導致波形失真。
在快速衰減和慢速衰減組合模式下,慢速衰減在雙極性步進電機保持在一個階躍位置時調節電流,而快速衰減則在電流必須快速下降到下一個階躍值時更有效地控制電流。
結語
與整步或半步模式相比,微步進模式可以實現更精細的定位和更平滑的操作。本文討論了如何在階躍之間利用慢速衰減和快速衰減來穩定電流。此外,組合衰減模式還可以減少扭矩脈動,從而減少振動和噪音。
MPS 提供種類繁多的步進電機驅動器,可以滿足各種應用需求。




 投訴建議
投訴建議
提交
雙極性步進電機(上):控制模式

直流電機:運行階段、故障檢測和保護以及直流電機驅動器應用
步進電機、直流電機和電機驅動器介紹
有刷直流電機和無刷直流電機:參數、操作和直流電機驅動器
充電器IC中的電源路徑管理