


庫卡機器人編程TRIGGER觸發指令的應用分析
KUKA機器人TRIGGER(軌跡切換指令)可以觸發一個定義的指令,能夠與機器人運動同時執行,與運動語句的起點或目標點有關。
1、TRIGGER WHEN DISTANCE 語句
該指令與運動語句的起點或目標點有關。
語法:TRIGGER WHEN DISTANCE=位置 DELAY=時間 DO 指令 <PRIO=優先級>
位置:規定在哪個點觸發指令。可能的值有:
0:指令在動作語句的起點處被觸發。
1:指令在目標點處被觸發。如果目標點是軌跡逼近形式,則指令將在該軌跡逼近弧形的中點處被觸發。
時間:以此可確定所選位置的延遲時間。
可應用正值和負值,以毫秒 (ms) 為單位表示,可以使用 10,000,000 ms 及以下的時間值。
可執行的指令有:給一個變量賦值(不能對運行時間變量賦值)、OUT 指令、PULSE 指令、調出一個子程序等。調用子程序時,必須給明優先級(有優先級 1、2、4 - 39 以及 81 - 128 可供選擇。優先級 40 - 80 是系統預留的,自動分配的)。
2、TRIGGER WHEN PATH 語句
指令 PATH 與運動語句的目標點有關。必須通過軌跡運動 (LIN 或 CIRC類型) 駛至目標點。該運動不允許是PTP類型。
語法:TRIGGER WHEN PATH= 行程段 DELAY= 時間 DO 指令 <PRIO= 優先級 >
行程段:確定相對目標點的位移。行程段以毫米 (mm) 為單位表示,可給出 +/- 10,000,000 mm 范圍內的位移值
正值:向運動結束方向推送該指令
負值:向運動開始方向推送該指令
時間: 在此通過 PATH 值確定至選定位置的位移時間。可為正值和負值,以毫秒 (ms) 為單位表示,可以使用 10,000,000 ms 及以下的時間值。
可執行的指令有:給一個變量賦值(不能對運行時間變量賦值)、OUT 指令、PULSE 指令、調出一個子程序等。調用子程序時,必須給明優先級(有優先級 1、2、4 - 39 以及 81 - 128 可供選擇。優先級 40 - 80 是系統預留的,自動分配的)。
例2:向運動結束方向切換
KUKA機器人TRIGGER指令在涂膠、激光清洗等應用較為常見,需要對某個指令提前或滯后觸發來滿足生產工藝要求。




 投訴建議
投訴建議
提交

三千余家國際基金投資機構云集高交會,攜萬億巨資尋找優秀種子企業

從IFA 2024看海爾在歐洲如何成為主流高端品牌

尼得科集團4家機床企業參展IMTS 2024

智能頭號玩家,高創PH3驅動精益生產升級
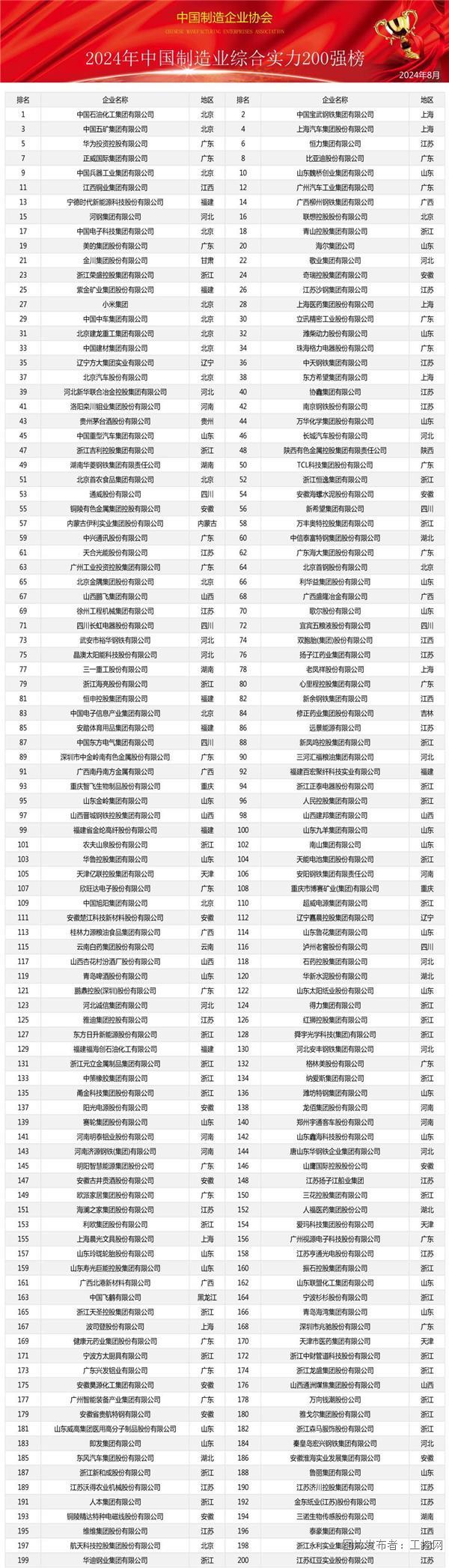
2024中國制造業綜合實力200強暨中國裝備制造業百強榜單震撼發布