


雙翌視覺系統配合機械手大視野定位案例
一、定位原理概述
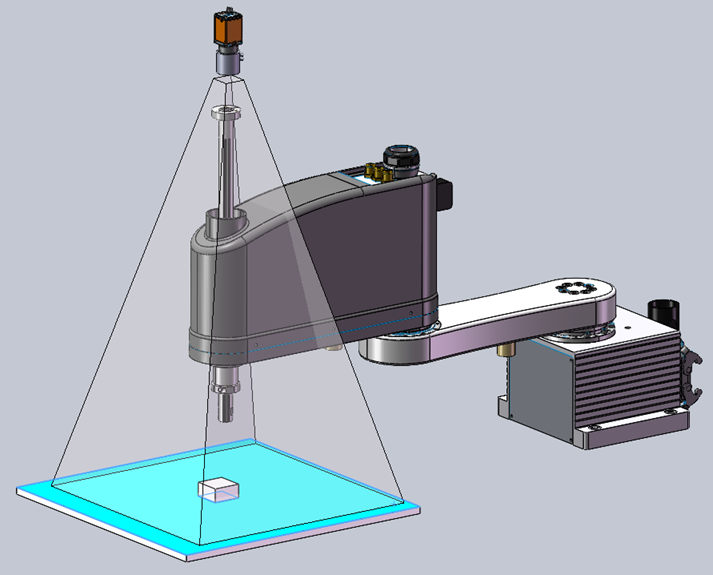
1.系統構架
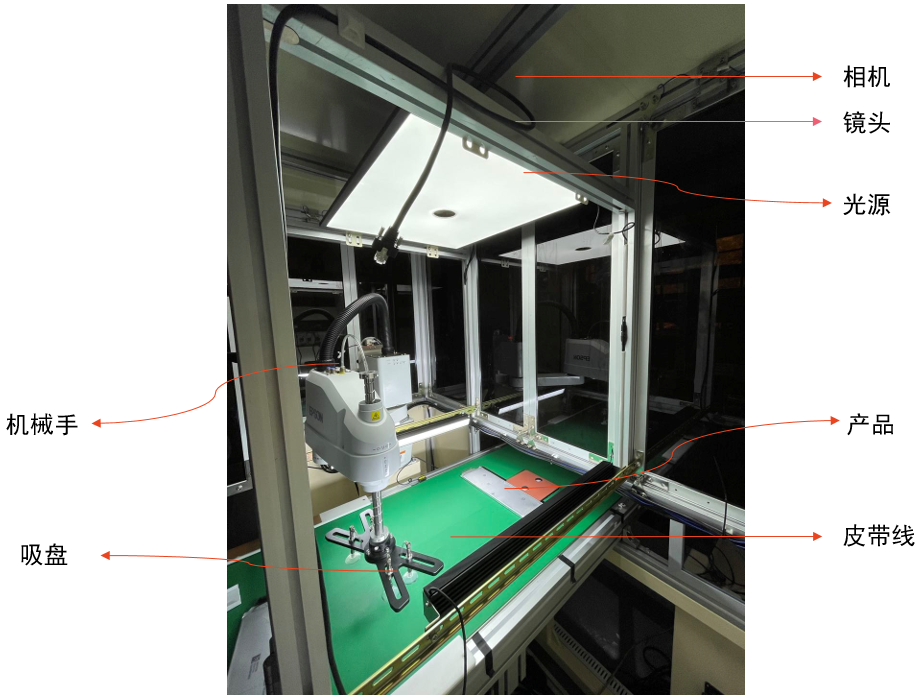
視覺定位系統采用正向打光方式,光源在機械手上方,CCD從上往下拍攝,進行圖像分析定位。相機將計算出的像素坐標轉換為機械手的物理坐標,視覺軟件與機械手進行網口通訊,將視野內物料的物理坐標發送給機械手,機械手抓取物料放在指定工位。
2.相機標定概述
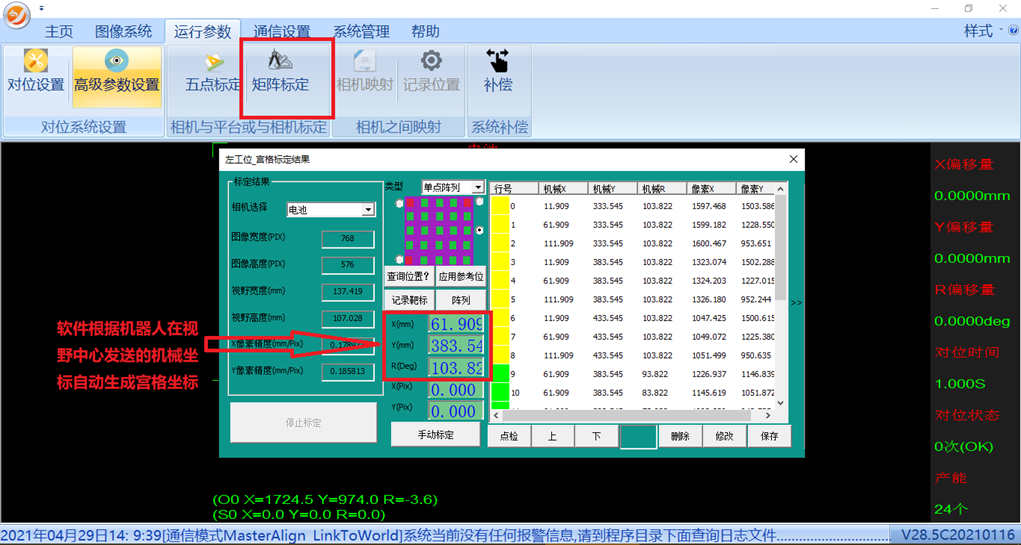
系統采用宮格標定確定像素坐標和物理坐標一一對應關系,同時利用3點或者多點旋轉標定求出旋轉中心
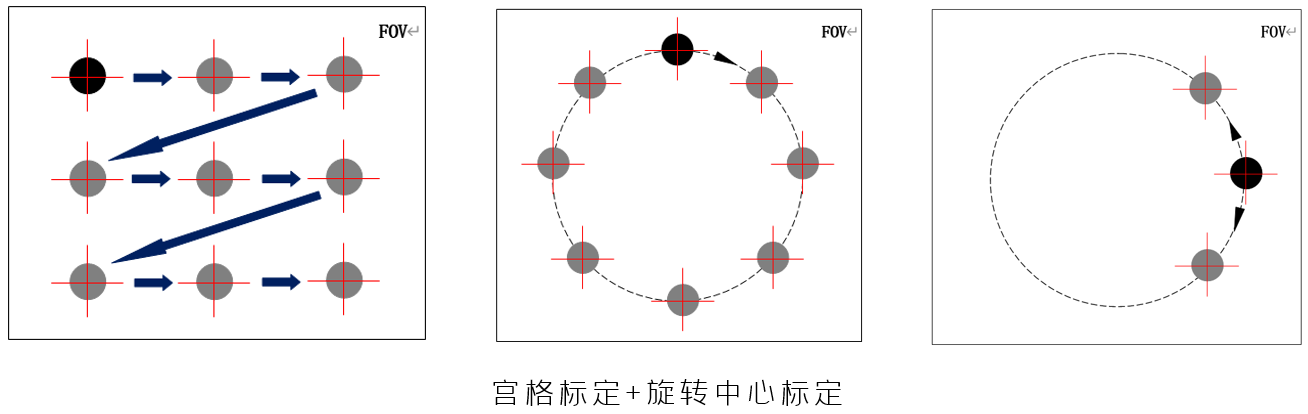
系統采用宮格標定,自定義行列數和間距及旋轉角度,通過機械手發送的當前機械坐標,視覺軟件自動計算出宮格機械坐標,視覺軟件與機械手進行網口通訊,機械手吸取物料到達指定的機械坐標,相機拍攝物料計算出像素坐標和機械坐標的關系。

二、調試流程
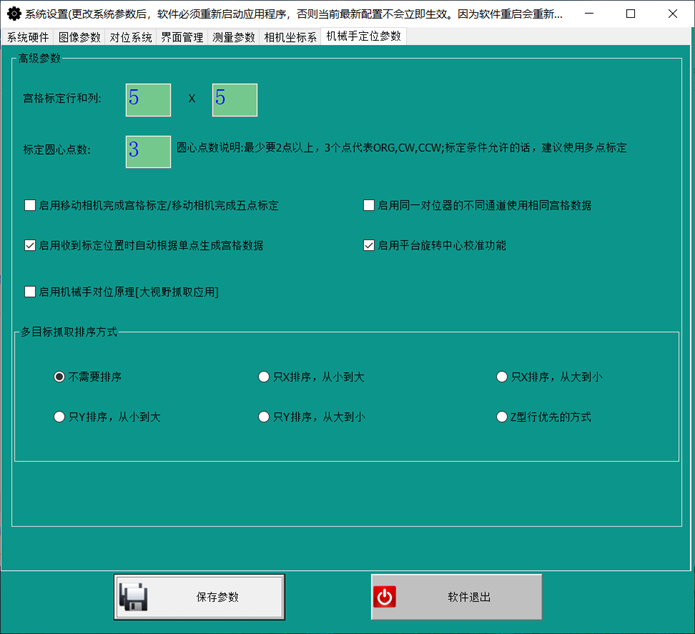
1.設置軟件配置——基礎參數

2.軟件配置——基礎參數

3.配置參數——根據視野計算宮格的行數和列數

4.配置參數——根據視野計算宮格的行數和列數
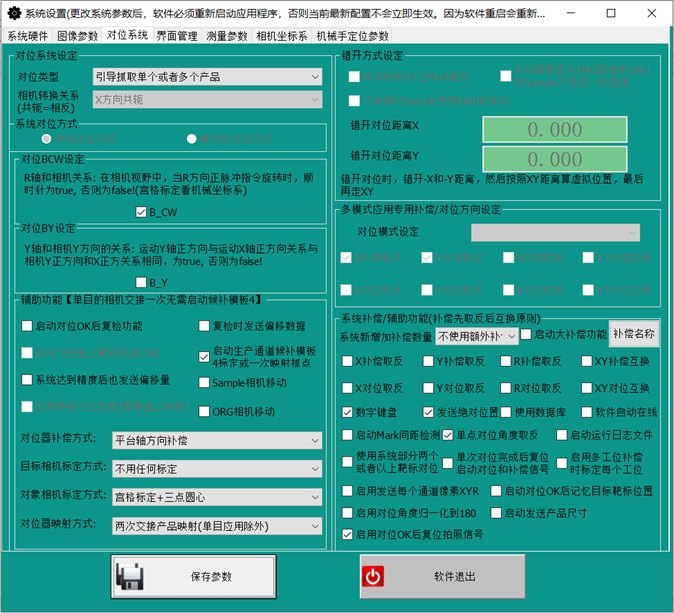
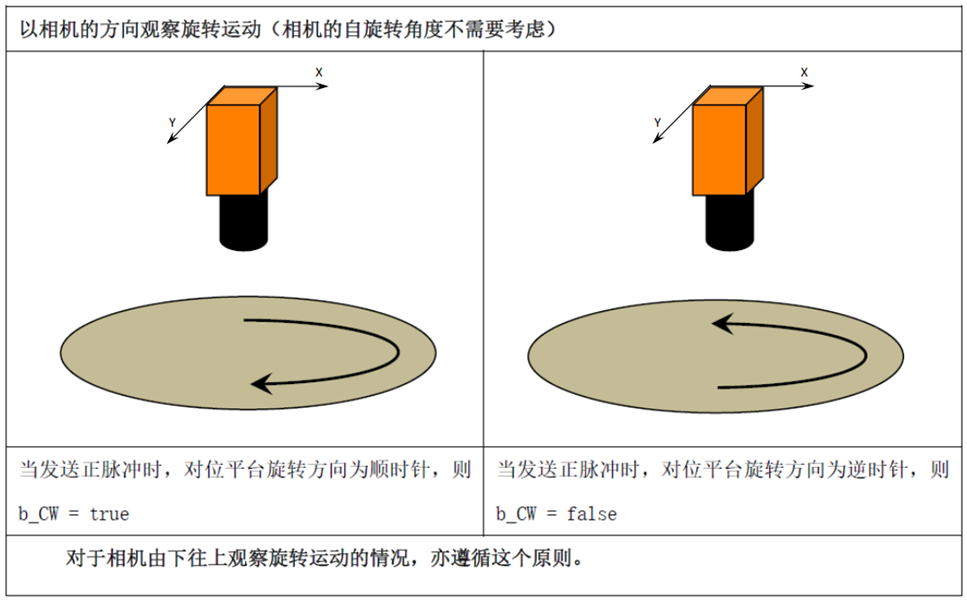
5.配置參數--BCW設定
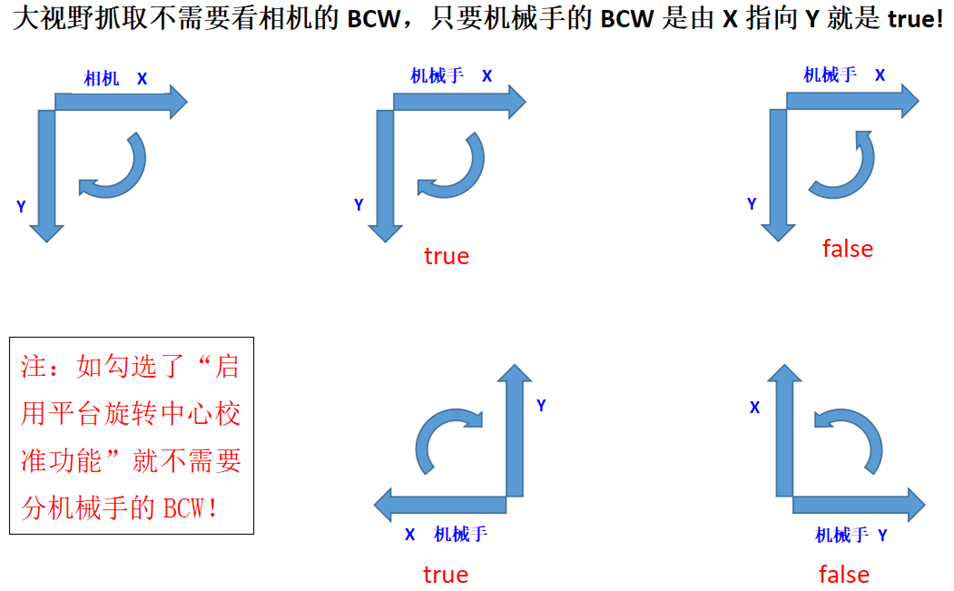
6.配置參數--對位的BCW設定
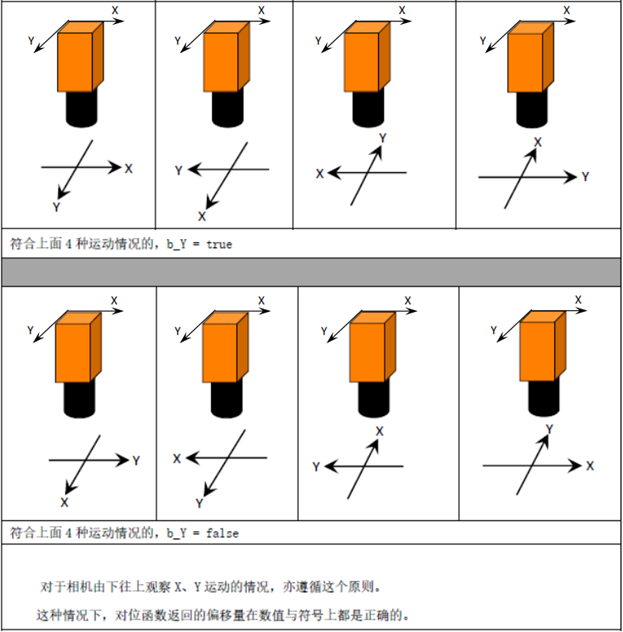
7.配置參數--對位的BY設定
以相機的方向觀察平臺X、Y運動(相機的自旋轉角度不需要考慮),相機能同時觀察X、Y方向的運動情況(標準模型)。運動Y軸正方向在運動X軸正方向的順時針90度處,為true,否則為false!
8.配置參數-根據視野計算宮格的行數和列數
9.通訊連接測試-確認通訊設置
點擊通信設置-端口參數,看通訊狀態是否連接上。
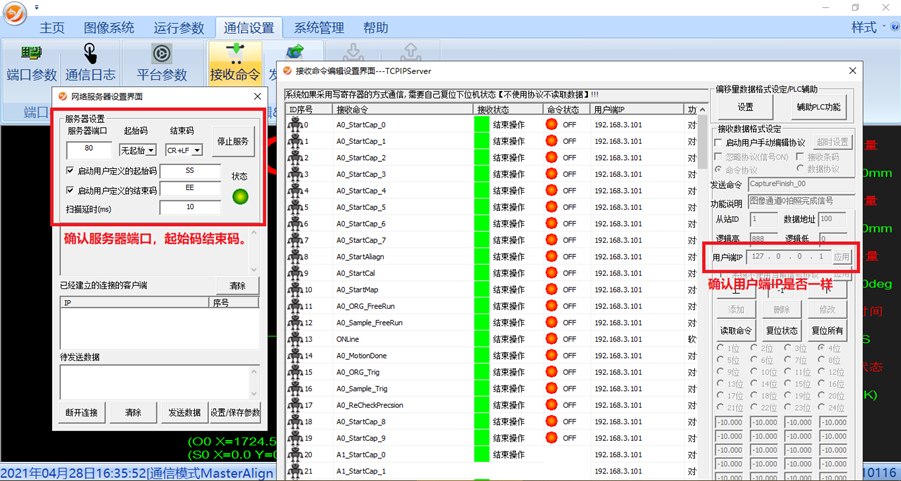
通訊不上可能存在一下幾點問題:
a、注意服務器端口、起始碼結束碼是否一樣。
b、注意用戶端IP是否一樣。
c、防火墻是否沒有關閉。
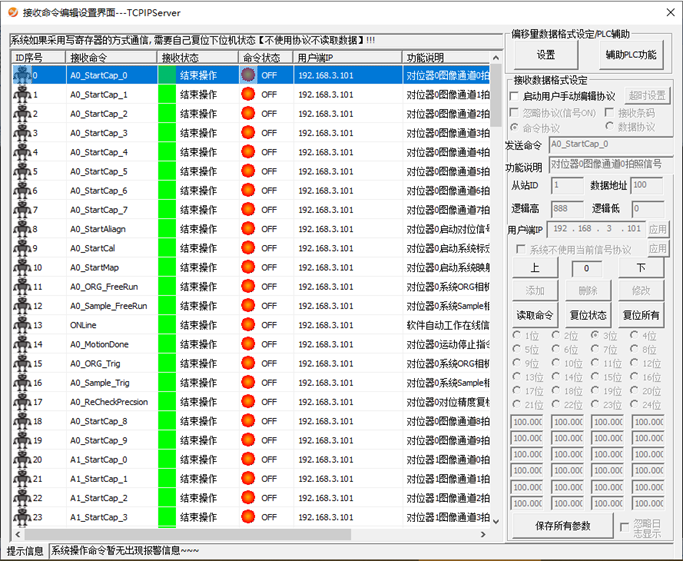
10.通訊連接測試-通訊協議測試
機器人給PC發命令,看是否能接收到對應的命令。
接收不到可能是通訊沒連上或者沒加起始碼還有就是命令協議寫錯了。接收到的數據不對或者顯示數據錯誤可能是用戶IP地址不對或者數據位不對。
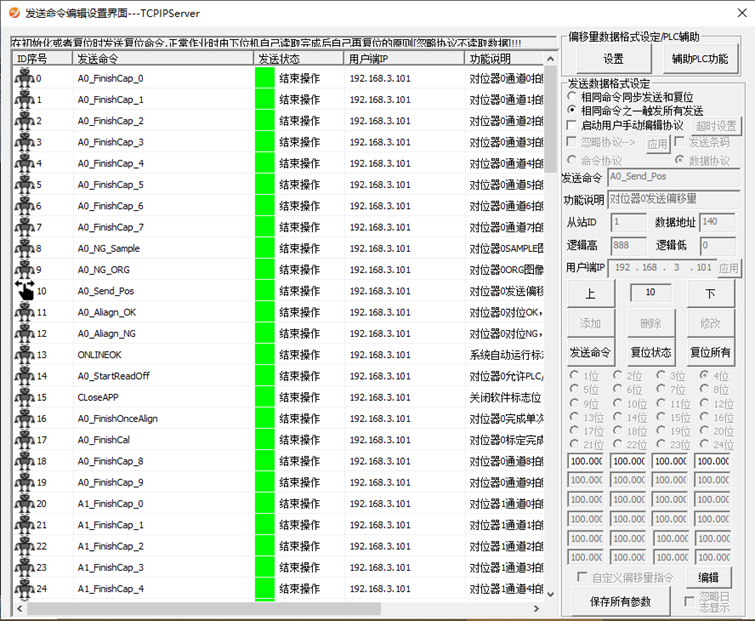
11.通訊協議測試
PC給機器人發命令,看是否能接收到對應的命令。
接收不到可能是通訊沒連上或者沒加起始碼還有就是命令協議寫錯了。
12.系統標定(機械手根據宮格坐標走位置吸放產品,相機對產品進行每個位置拍照)
標定方法:機器人抓取一個標定板,在視野中間位置,對標定板進行模版學習然后機器人發命令開始標定。
說明:只要相機拍照位置有改變必須要進行標定
13.標定方式
a.取放的方式標定:抓取產品或者標定塊在視野里進行取放標定。
此方法比較適合用于放料平臺有真空吸附的,防止取放的時候產品有移動。
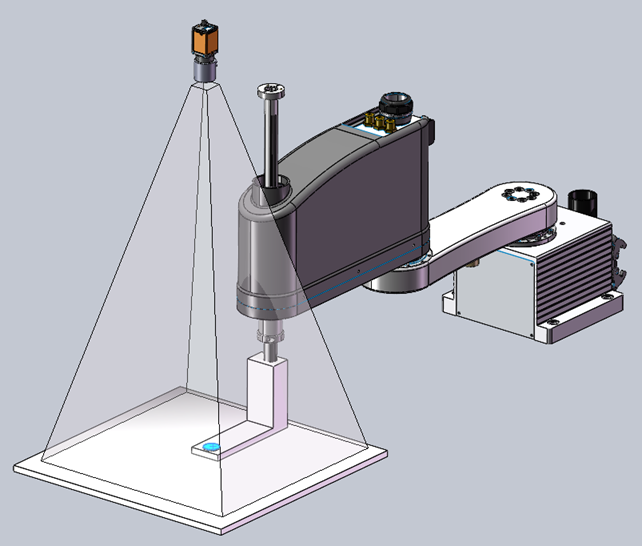
b.探針標定插點方式標定:放置一個標定板(3*3Mark點標定板)移動機器人去戳點然后相機記錄位置。
此方法標定精度高,人工操作麻煩,需要移動機器人人眼觀察探針是否插到標定板Mark點中心,然后在視覺里輸入坐標位置。
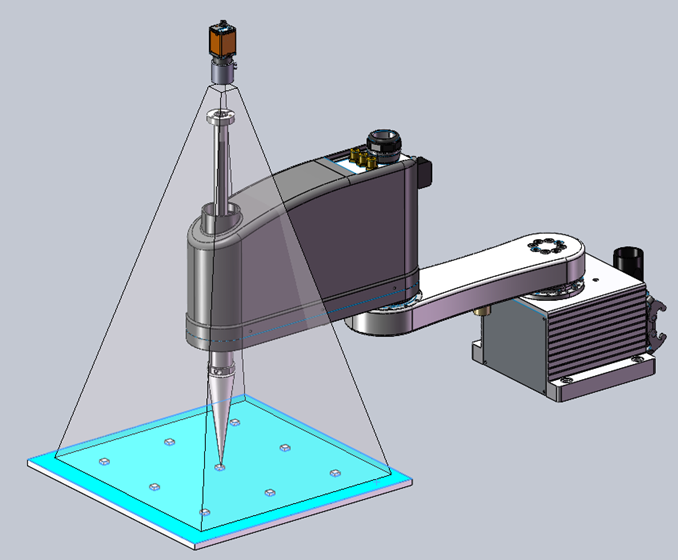
c.伸棒棒標定方式:因為相機上照機械手會擋住相機的視野,所以用一個較長的標定板鎖在機械手或者吸在機械手上。標定板上會有一個Mark點將Mark伸到視野中心開始標定。
注意標定板到鏡頭的工作距離盡量于鏡頭到產品的工作距離一樣!
此方法適用于結構空間較大不會擋住機器人運動時使用。這種標定方法的精度沒有探針的標定方法精度高。
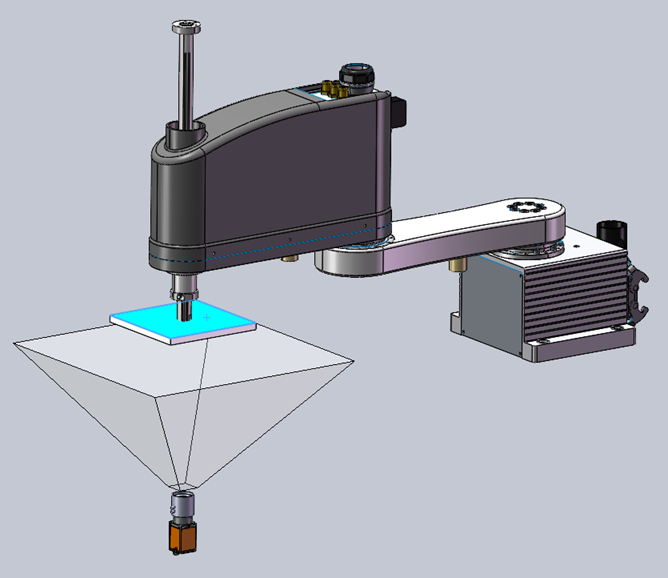
d.吸著不放的標定方式:就是吸著產品或者標定板在相機視野內移動拍照標定。此方法比較適用于相機視野不會被機械手擋住的情況。
標定時注意產品到鏡頭的工作距離是否一樣。
14.示教生產位置
機器人抓取產品放到視野中心位置然后離開,相機拍照修改記錄當前位置保存為基準點。

注:示教時注意機器人的旋轉角度要與標定時的旋轉角度一致!
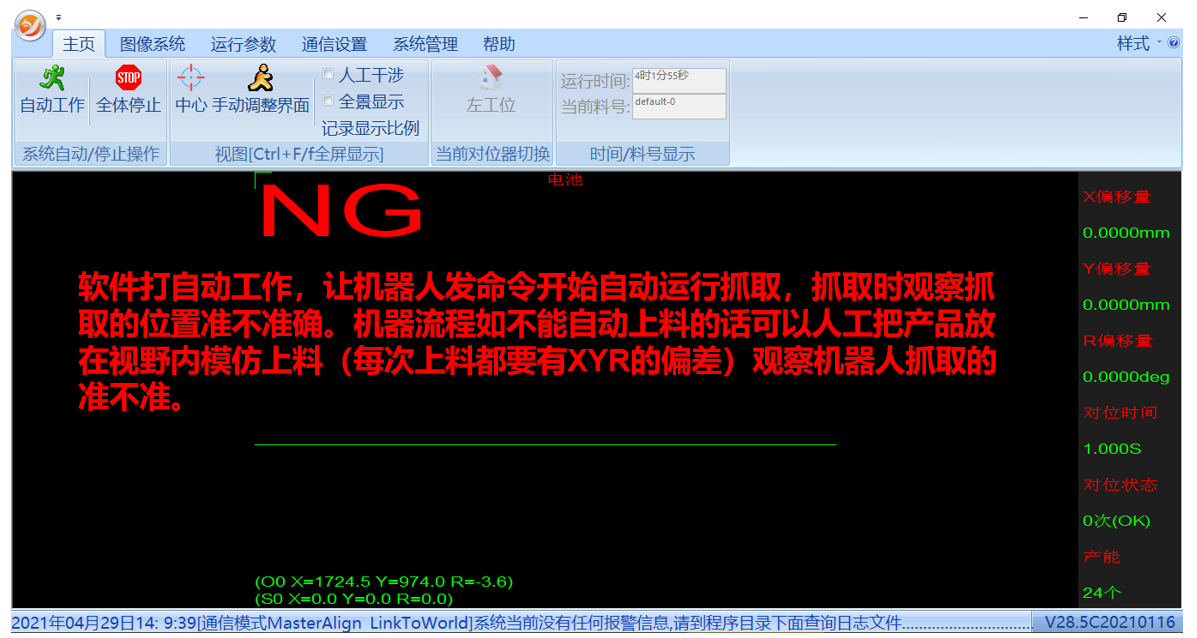
15.自動運行測試
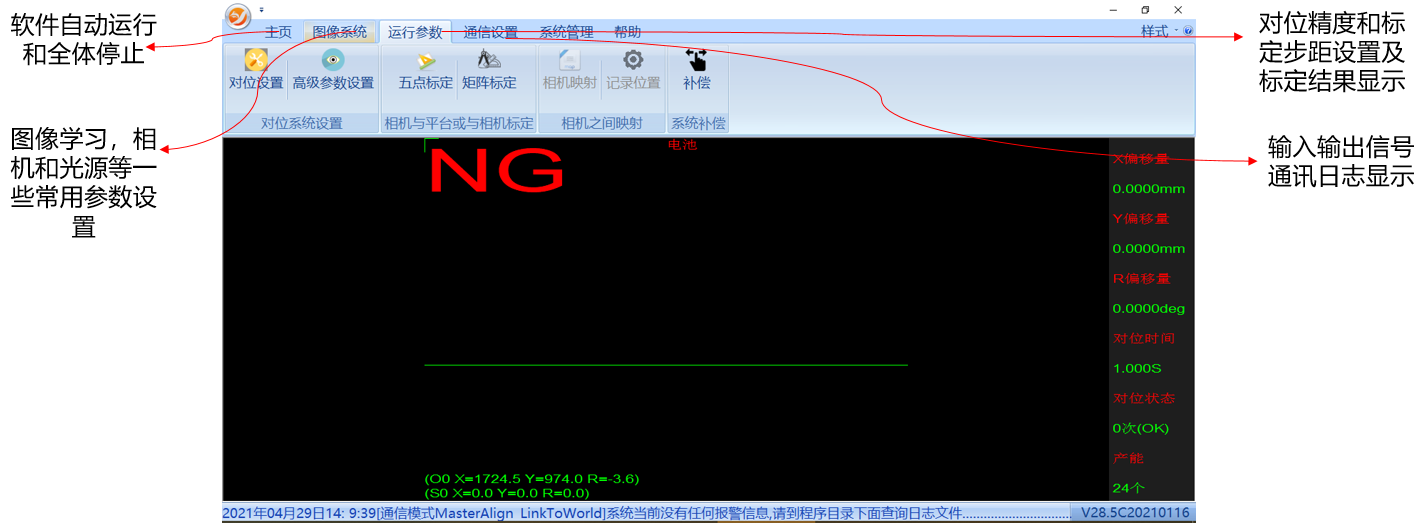
三、軟件操作介紹
1.軟件主頁
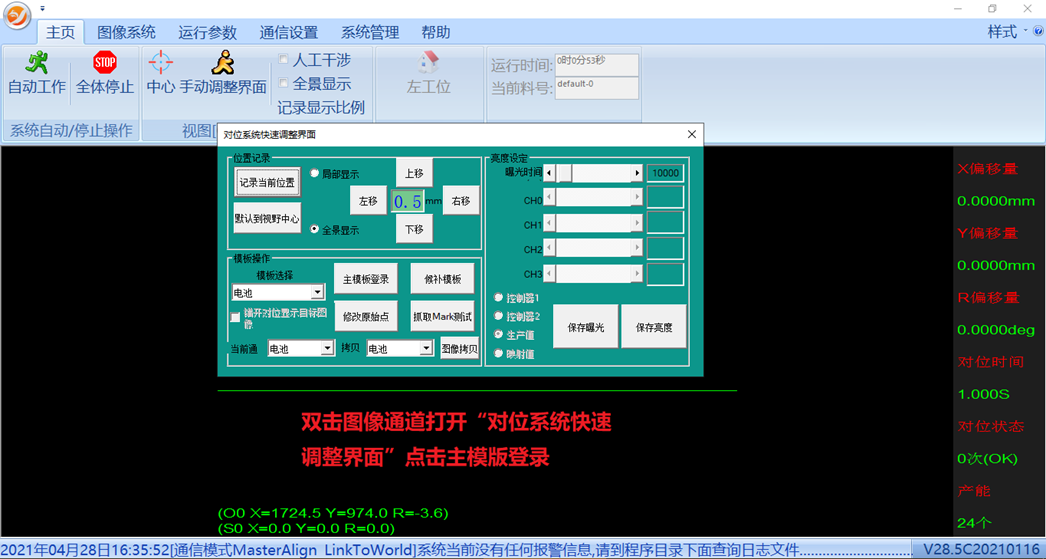
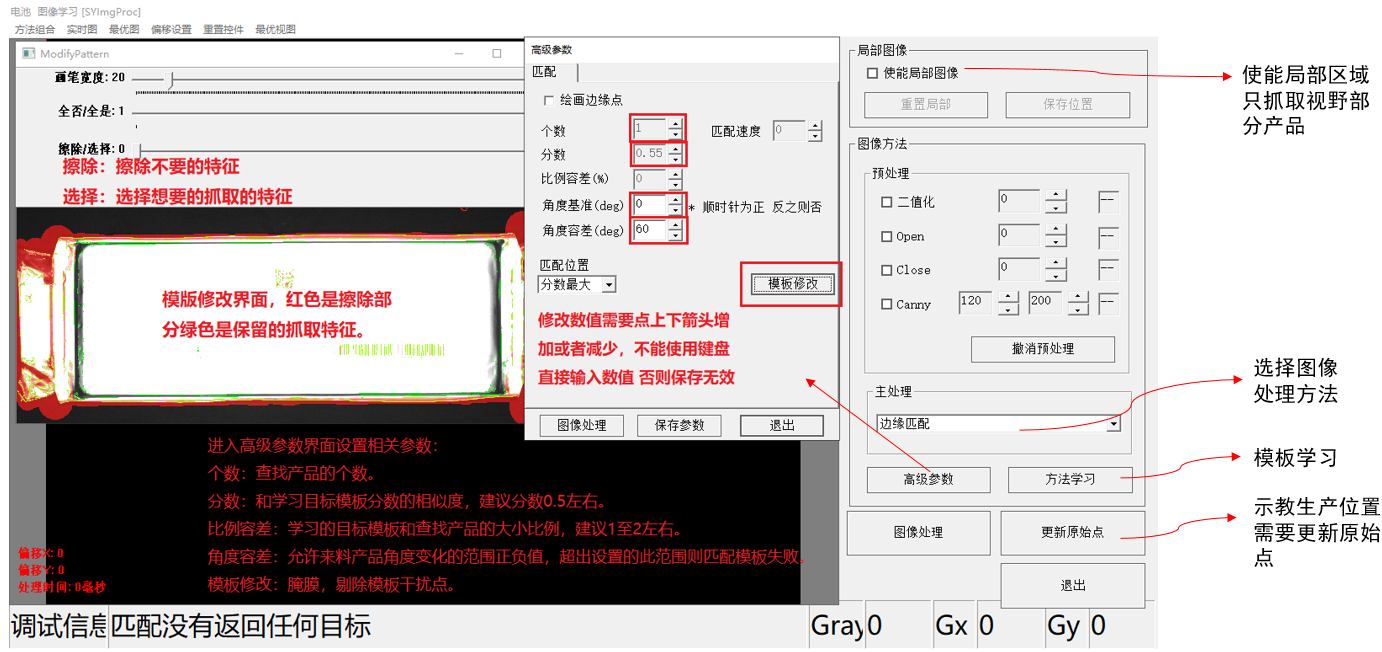
2.圖像學習
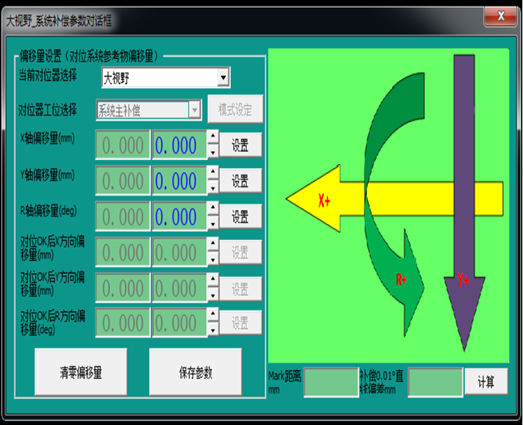
3.系統補償
根據實際應用需求,機械手吸盤抓取物料中心位置偏差進行補償。補償的方向參照機械手的的坐標系方向。如圖方向所示。




 投訴建議
投訴建議
提交
WiseAlign視覺對位軟件提示系統校準時間錯誤解決方案
MasterAlign視覺對位軟件提示系統校準時間錯誤解決方案

MasterAlign全景視覺引導應用
MasterAlign模切視覺應用軟件說
MasterAlign智能穿戴視覺應用說明