1、 相機安裝
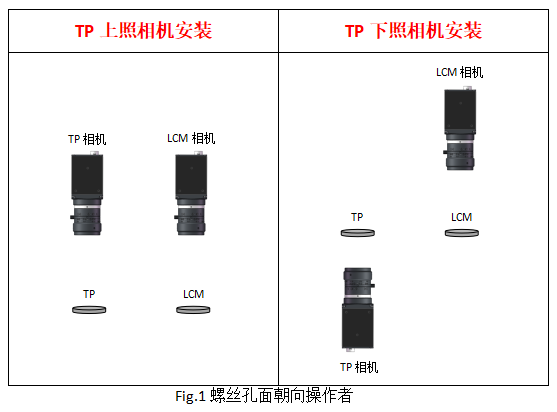
相機的安裝方向:以操作者站立調試的位置為基準(一般就是顯示器的位置),相機的螺絲孔面朝向操作者,標簽面(即正面)遠離操作者。這樣才能保證實際圖像和顯示器圖像保持一致性,方便調試。
2、 軟件權限的登陸
① 點擊軟件左上角的“橙色圖標”,點擊“用戶”進入用戶設置界面;

② 用戶管理界面,輸入供應商權限密碼:“310525”,點擊“用戶登陸”,進入軟件管理權。
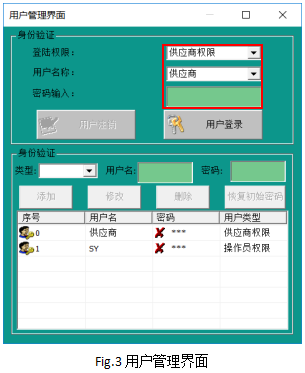
③ 有登陸權限,才可以設置軟件參數,修改產品模板,非登陸狀態,不能更改以上數據。
3、 設置待機位(控軸)

設定對位平臺的待機位原則即是:使對位平臺的行程最大化。即要求對位平臺各軸到正負限位的距離相等。
設置待機位之前需要啟動復位進行平臺回零,回零完成后點擊“軸操作/IO監控”->“手動操作”彈出軸操作界面,選擇X1軸,填寫點動距離,通過手動點擊正反轉操控X1軸到限位中間位置,最后點“保存點位”。同理設定X2軸和Y軸的待機位置,如此便完成了對位平臺待機位的設定。
4、 產品換型
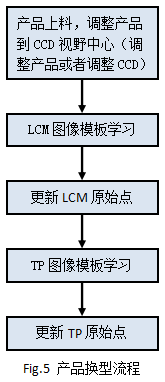
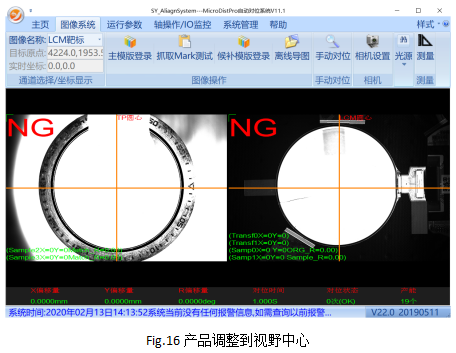
4.1、產品上料,調整到CCD中心
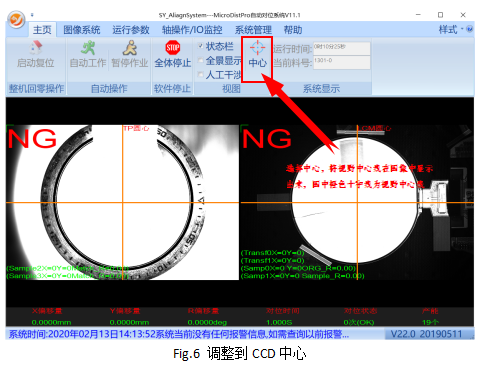
軟件上點擊中心,在圖像中可以看到橙色的十字線,這個為視野中心,在產品上料過程中,我們需要將產品放置到橙色十字交點即視野中心位置。
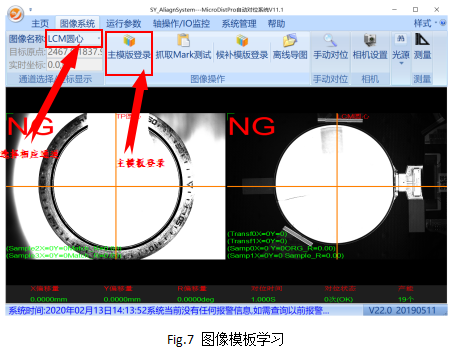
4.2、圖像模板學習
4.2.1、圓心的模板學習
? Step1:如圖7所示,通過“通道名稱”處選擇我們要進行模板學習的通道:“LCM圓心”,然后進行“主模板登錄”進行圖像的模板學習。
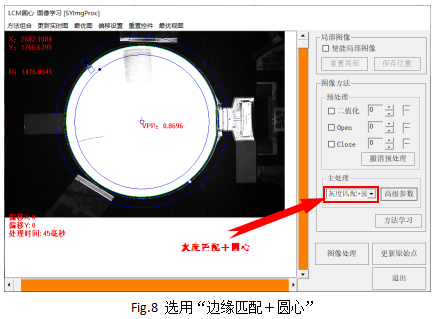
? Step2:如圖8所示,下拉重新選擇“灰度匹配+圓心”,黃色的模板框工具和藍色的圓心工具則會顯示出來,通過拖拽調整使圓心工具的中環與Mark圓形邊緣相接,模板框位置和大小到合適,再點擊“方法學習”,則學習記錄當前的模板。
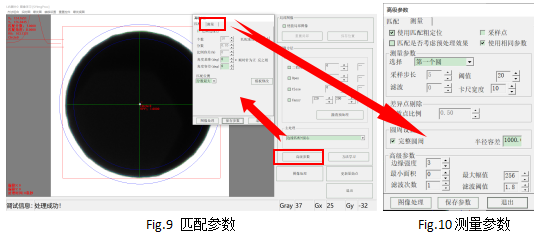
? Step3:調整高級參數。點擊“高級參數”,進入高級參數界面,調整參數如下圖9與圖10。可根據實際情況修改“分數”、“濾波次數”、“有效點比例”參數。
使用匹配粗定位:
抓邊工具位置是否需要關聯匹配粗定位的坐標結果,默認勾選
匹配是否考慮預處理:
采用模板匹配結果來定位抓圓工具時,是否需要使用預處理后的圖像做匹配粗定位,默認不勾選
使用相同參數:
抓圓工具的閾值參數分開設定還是使用相同的參數,默認勾選
采樣步長:
卡尺工具間距,一般設置為卡尺寬度的1/2,這樣目標邊邊緣的采樣點就不會遺漏
閾值:
黑白灰階過度的門限值,默認值20
濾波:
濾除圖像中的噪聲,默認值為0。目前這個參數不建議使用
卡尺寬度:
卡尺工具的寬度,例如卡尺寬度是10代表會在是個像素點的寬度范圍內取到一個有效點。默認值為10
有效點比例:
有效點的上限值,默認值為0.5
聚類:
該功能不建議使用,默認為不勾選
完整圓周:
可以采用抓取360度圓的工具,也可以使用抓取小于360度圓的工具
半徑容差:
當前抓取的圓半徑和模板圓半徑差值
邊緣強度:
周圍象素灰度有階躍變化的那些象素的集合,例如設置為3代表軟件會用相鄰3個像素的灰階進行比較得出一個像素跳變的像素點。這種方式求出的像素跳動點相對穩定一下。默認值為3
濾波次數:
執行濾波的次數,默認值為1
濾波強度:
執行濾波的強度,默認值為1.8,值越小濾波強度越大
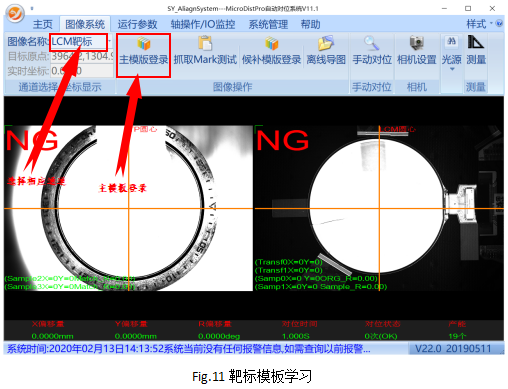
4.2.2、靶標的模板學習
? Step1:如圖11所示,通過“通道名稱”處選擇我們要進行模板學習的通道:“LCM靶標”,然后點擊“主模板登錄”進行圖像的模板學習。
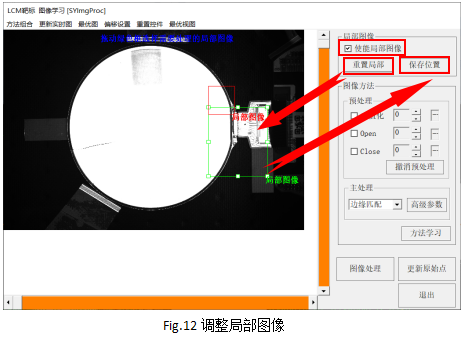
? Step2:如下圖12所示,勾選“使能局部圖像”,點擊“重置局部”以調整局部圖像的范圍和位置,調整完畢后,點擊“保存位置”進行保存。局部圖像是限定圖像的查找范圍,以提高命中率和縮短圖像處理時間。
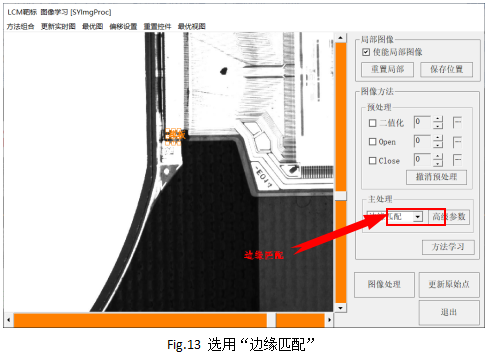
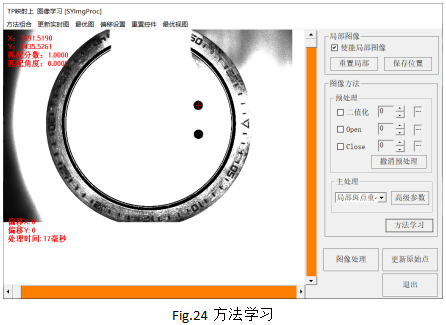
? Step3:如下圖13所示,下拉重新選擇“邊緣匹配”,黃色的模板框工具則會顯示出來,通過拖拽調整使模板框位置和大小合適,再點擊“方法學習”,則學習記錄當前的模板。
? Step4:調整高級參數。點擊“高級參數”,進入高級參數界面,調整參數如下圖14所示。可根據實際情況修改“分數”、“角度容差”參數,修改完成后點擊保存。
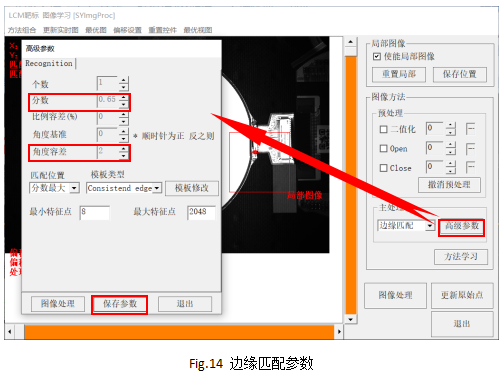
“分數”是限定模板匹配度相似度的參數,范圍:0~1,代表圖像與模板相似度必須高于該設定值。否則認為NG。
“角度容差”是限定匹配角度范圍的參數,范圍:0°~ 180°,代表允許角度偏差范圍:±0°~±180°。超出則NG。
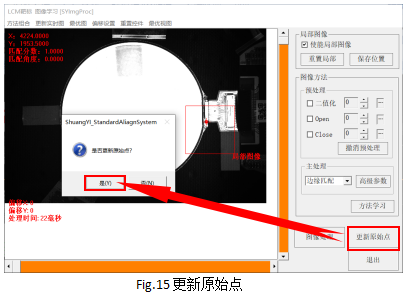
4.3、更新原始點
更新靶標原始點的作用是將當前通道的Mark點與圓心連線的角度作為產品角度的基準角度。
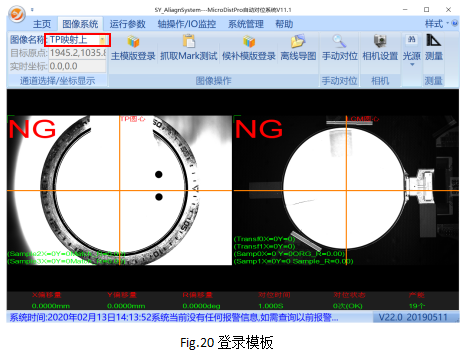
4.4、TP的模板學習和更新原始點
操作參考4.2和4.3。
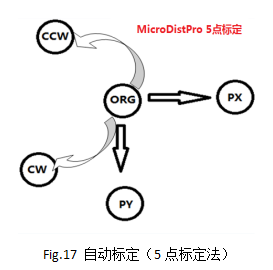
5、 相機自動標定
相機自動標定流程主要目的是建立相機和對位平臺的關系。
5.1、調整產品到視野中心
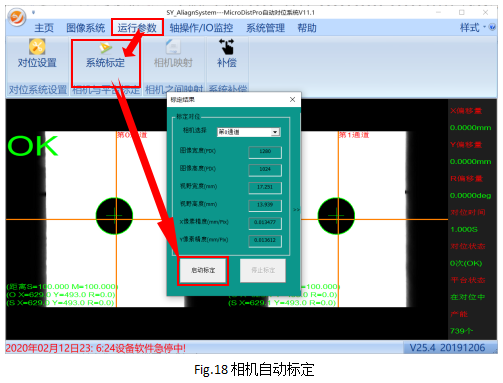
5.2、相機自動標定
相機標定,通過機器手平臺自動完成相機和平臺的關系建立,特別方便客戶換型,用戶只需要1分鐘即可完成標定。
系統全體停止的狀態下點擊“運行參數”->“系統標定”,彈出標定界面后,點擊“啟動標定”即可開始標定,系統提示標定完成即完成標定。
6、 相機映射
相機映射的目的是建立對象相機與目標相機之間的關系。
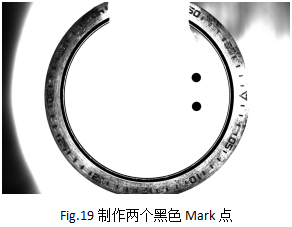
6.1、學習映射通道的模板
? Step1:在TP上貼兩個黑色的Mark點,并將TP放置到治具上通過模組搬運到目標相機下。
? Step2:選擇對應的映射通道,學習Mark點的模板。
a) 選擇對應通道并登錄主模板;
b) 設定局部圖像;
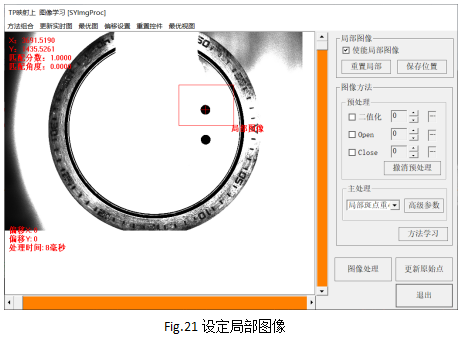
c) 使用“局部斑點重心”學習Mark點模板;
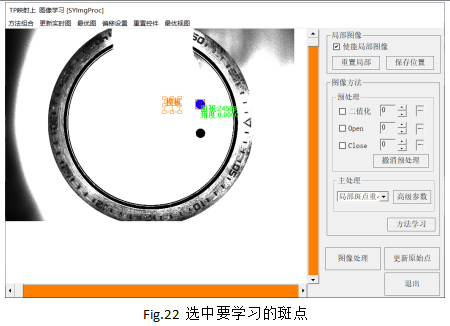
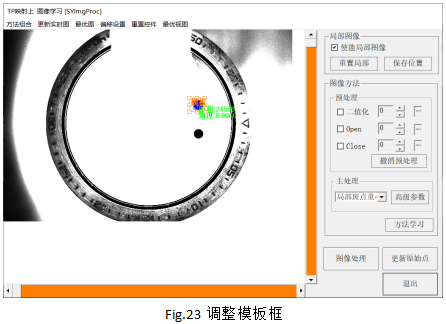
d) 以同樣的方法學習下面的Mark點的模板;
? Step3:將TP搬運到對象相機下,學習對象相機映射通道的模板,方法與前面相同。
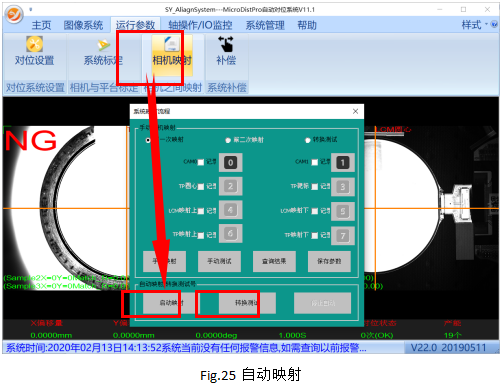
6.2、開始映射
自動映射:PLC配合視覺系統完成了自動映射功能的情況下可以使用自動映射。
系統全體停止的狀態下,打開相機映射界面,放置好TP,點擊“啟動映射”,抓點OK完成第一次映射后,再點擊“轉換測試”進行一次轉換測試。
手動映射:
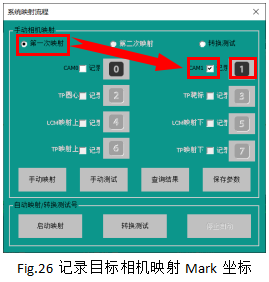
1) 系統全體停止,將帶有兩個Mark點的TP搬運到目標相機下,打開映射界面,勾選第一次映射,再勾選目標相機CAM1,點擊記錄按鈕,系統會抓取兩個Mark點的坐標。
2) 通過手動控制搬運模組將TP搬運到對位平臺的貼合位上,也就是對象相機的下方。再勾選對象相機CAM0,點擊記錄按鈕,系統會抓取兩個Mark點的坐標。

3) 點擊手動映射。

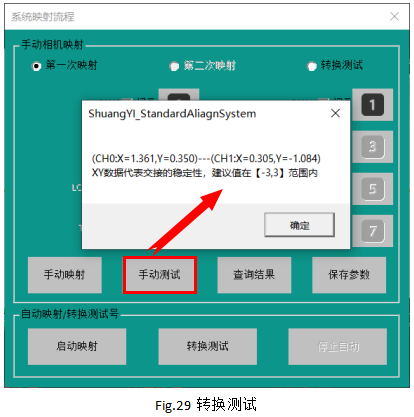
4) 重復1)、2)步驟,再搬運一次TP,抓點OK后點擊手動測試。CH數據需要在【-3~3】范圍內才算映射合格。代表產品交接穩定,否則需要檢查抓點問題和機構交接的穩定性問題。
5) 手動映射需要手動保存映射數據,否則重啟軟件數據丟失。自動映射則會自動保存。

7、 程序補償功能說明
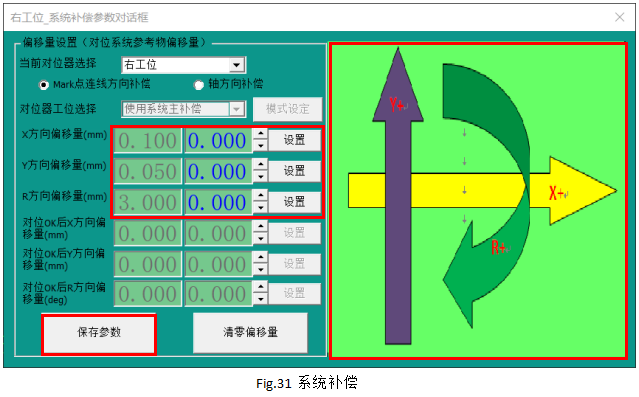
根據補償方向圖示,在右側對應的方向補償寫入補償數值后,點擊“設置”累加到左側的總補償參數中。設置完補償參數退出前必須要點擊“保存參數”,補償才能生效。







 投訴建議
投訴建議