


綠色環保的運動控制
機械制造業者總是致力于追求更高的生產力和更高的產量(當然是以更低的成本來進行)。這個目標可以通過更優秀的機械動力表現和更高的準確率來達成。
典型的高速和精密機械涉及復雜的過程力學,有時候關系到機械減速裝置(齒輪)、伺服電機、伺服驅動器、電源和機械控制器。
機械負載的控制是通過將電力轉換為機械功率來實現。
當主電源所供應的電力等同于所消耗的機械功率時,就是理想而高效的轉換,這也正是制造過程所需要的。
然而,轉換程序牽涉到許多效率低下之處以及環境污染,以致于整個過程非常不環保,即“不夠綠色”。
埃莫在機械設計和實現的重點領域上,一直致力于降低“機械環境污染”:
1.優質的功效
2.共享的直流電總線
3.步進伺服直驅
優質的功效
通常在討論“綠色環境”時,第一個會想到的就是熱的生成。然而電磁干擾、機械故障和電力不穩等,仍然對環境造成了顯著的不良影響,衰減的情況更造成功耗增加、損失更高的結果。
伺服系統的“優質功效”是什么?
優質功效就是能為負載準確地提供所需動力的能力,換句話說,就是“不多不少剛剛好”。
對機械負載任何意外或不必要的傳輸(過多或不足)就是噪聲,噪聲也造成了電和機械性的污染:
*寄生諧波和不必要的諧波(電力的和機械的)
*過熱(在驅動器、電機和機械負載上)
*電磁干擾
*機械振動和機械共振
*共振(機械的和電力的)
這些“非綠”效應根本上減損了系統的性能表現。
針對這些故障和干擾,傳統的解決辦法是添加特定的元件進去,如大型的線路濾波器、線路電感器、額外的散熱片和風扇等。在某些情況下,機械結構的部分需要做些調整才能變得更有彈性和穩定。在其他情況下,“單單”放慢操作就能避免部分的振動和共振的發生。
大多數的解決辦法都會膨脹機械的尺寸、設計和操作勞力、成本,以及設備的散熱量。
伺服鏈上的各環節(負載、電機和驅動器)是這些造成膨脹的解決方案的主要部分。埃莫的方法則是強調伺服驅動器在降低整體污染上扮演了關鍵的角色,這可以通過驅動器本身來降低,也可以通過伺服鏈上其他元件來降低。
埃莫的哲學:
“不生成熱,就不需要散熱。”
“不制造噪聲,也就不需要消除噪聲。”
“運用先進智能控制系統,就能免去機械的修改調整。若以上都做到了,不止性能表現會提升、成本會降低、投入市場時間會縮短,還能創造出‘更加綠色環保的機械’。”
理想的伺服驅動器要能提供給機械負載相應的需求功率
(速度和轉矩),保證幅度和時序的同步。

然而,實際的動力轉換遠不及于理想情況,看起來更接近以下的情形:

動力轉換上典型的“寄生”效應
動力轉換和伺服操作之間有什么關聯?
伺服運作主要關系到轉矩/力的性能表現,但是
功率 = KP * 速度 * 轉矩(或力)
那么,優質功效就代表了高性能表現和順暢的速度與轉矩 = 伺服操作。
伺服驅動器的操作確定是關鍵的決定因素,它由三個會造成環境污染的“時域”組成:
*速度與位置回路,機械領域
*轉矩/力的性能表現,電力領域
*動力轉換,脈沖寬度調制(PWM)領域
脈沖寬度調制(PWM)
影響伺服系統的整體性能表現的主要因素中,有幾個受PWM動力轉換程序而左右:
*效率
*電磁干擾
*線性度
*響應和帶寬
埃莫的獨家動力轉換技術,FASST:”快速軟開關技術”克服了前述的缺點和限制。
埃莫最新的Gold Twitter就是一個很好的范例,它也集成了一個綠色環保伺服驅動器的必要元素。這是功能最強、納米級超小尺寸、高效、電磁干擾幾可忽略、智能控制的伺服器,“它可以被安裝在各種位置”。


開啟
完美的PWM轉換系統非常快速(<200 ns),深開啟飽和,高效,且應力極低,電磁干擾幾可忽略(極低的恢復電流)。

關閉
完美的PWM開關系統非常快速(<100 ns),深開啟飽和,高效,極低的應力,電磁干擾幾可忽略(沒有電壓過沖) 。
埃莫的伺服驅動器展現了優異的效率。
例如:在50V/ 50A時,埃莫的驅動器功耗 ≈17瓦特,而同業的驅動器在同樣條件下卻有120瓦特的功耗。
由于快速而順暢的開關轉換,深開啟飽和,電磁干擾幾可忽略,順暢而線性的轉換, Gold Twitter可以達到:
*投入 ≈ 4000W 而功耗<20W ;
*更大的帶寬,電流(甚至可達 >4.5 KHz),高速,定位準確;
*更快 而且更精準的響應時間;
*特別寬的線性電流回路。動態范圍為2000:1(一個50安培的驅動器可以以 0.025 安培驅動電機而仍能維持穩定順暢的運作。)
*先進的控制濾波器范圍多樣,能滿足各種伺服負載的需求。
幾可忽略的電磁干擾


結果就是一個帶有極高功率密度的納米級超小尺寸驅動器:
?
Gold Twitter所產出的功率密度比 Gold Hornet 系列的驅動器還高出5到6倍。在Gold Twitter推出前,Gold Hornet系列可是功率密度產出上的世界冠軍。
效率和“無噪聲”意思是需要消散的熱更少,不需要靠外力來減噪,體積更小,可以被安裝在移動的負載上,在電機上,電機內或電機旁,“布線惡夢”不再(尤其是移動電纜,它們不止昂貴,壽命不長,還會增加機械的能耗)。
所有以上特色帶來的結果就是用電更少,機械設備更輕巧,也能降低功耗和整體的污染情況。除了更加環保外,性能表現更好,成本更經濟。
轉矩/力的控制
順暢、穩定、快速響應的轉矩不止對伺服表現來說非常必要,對于降低功耗、電和機械性不必要的諧波來說也非常重要。
所生成轉矩的質量受到2個根本功能左右:
*矢量控制
*電流回路
在矢量控制法上,轉矩為:
*轉矩 = K * Icurrent * VBEMF
= K * Icurrent * VBEMF *COSθ+ K * Icurrent * VBEMF * SINθ

*只有 K * Icurrent * VBEMF* COSθ 生成“真正的”轉矩。
*K * Icurrent * VBEMF* SINθ 為“純粹的”轉矩衰減、熱損失和擾動。
*對高質量的轉矩來說, Icurrent 和 VBEMF 必須盡可能接近正弦波形。
*VBEMF 是電機的 特性
*Icurrent 是伺服驅動器所“生成的”
所實現的高質量且高效轉矩:
*當θ = 0 (COSθ=1)時達到最大轉矩
*當θ 恒定,不隨時間的變動而變動時,就能產生順暢而穩定的轉矩。
*矢量控制回路努力地生成正弦曲線Icurrent 并保持θ = 0。

COSθ≠1的結果:
*轉矩衰減
*轉矩擾動
*過熱

高性能表現的矢量控制能在各種條件下達到COSθ=1 ,再加上順暢穩定的高轉矩所帶來的反電勢換向,因此不需要更多電流,也不需要用上更多功率來達到所需的轉矩。
在COSθ≠=1 的任何操作都是浪費能源的,而且會制造多余的熱。
電流回路的性能表現受到伺服驅動器的3項能力左右:
*電流回路帶寬
*電流回路響應時間
*電流回路動態范圍
先進且“清潔”的功率級設計和電流回路運作,連同EASII( 埃莫的應用工具軟件),實現了最佳的電流回路性能表現,也因此準確地提供負載所需的轉矩,沒有多余的動力,沒有能耗過沖和瞬態等。
速度控制與位置控制
極大的帶寬和高度精準的電流、速度和由EASII(“帶領您完成整個任務的工具”)調定的位置,使得您能以最小/可忽略的“寄生”效應對機械負載做出最佳的控制。
埃莫的哲學:
“我們會讓您的機械創造出最大成果。”
運用埃莫性能強化的智能型先進伺服控制,在很多情況下能使得機械的寄生效應變弱,因而免去了昂貴的機械調整的需要。消除機械的寄生效應也成為一個“更綠色環保”的解決方案。
以下范例是搭配EASII(埃莫的應用工具軟件)進行配置和調整的埃莫驅動伺服器,所展現出來的高速、順暢、無振動的性能表現。

*非常快速的響應,低過沖
*高分辨率、穩定且“無振動”的運作
埃莫如何達到優質的綠色環保功率控制呢?
*帶寬(電流、速度、位置、矢量)和快速響應讓所需的速度X轉矩/力(功率)得以供應/準確而迅速地被吸收。
*矢量控制:智能、非常精準而迅速的矢量控制,帶來“順暢的”轉矩和功率,也消除了效率低下的情況。
*先進的調整工具濾除寄生的、非線性的效應(共振、摩擦、慣性…),因而消除了應用的“功率污染”。
*高效率的動力轉換形成了非常低的“多余”功率。
*獨家的FASST動力開關技術形成了非常高的線性度、快速的響應、最高效率,電磁干擾幾可忽略– “順暢”的伺服操作而且零污染。
共享的直流總線
一個伺服操作牽涉到以下速度-轉矩平面上所有4個象限的能流。

在象限1和3,動力為正向,也就是動力從驅動器流向電機,在電機內,動力從電力形式轉換為機械形式,然后再傳送至負載。此為電機驅動操作。
在象限2和4,動力為負向,也就是動力從機械負載反向流回電機,在電機內,動力從機械形式轉換為電力形式,然后再傳送至驅動器。此為再生式操作,有時候也稱為剎車。
在電機驅動操作上,被轉換為機械能的動力被用來推動機械負載。
以交流電/電力網絡操作時,要對伺服驅動器供電有兩種基本的拓撲架構。
“共享直流電總線”的拓撲架構,以供應多重伺服驅動器電力。

在“共享直流電總線”上,“多重”伺服驅動器運用單一一個電源。

“交流電公用總線”
在“交流電公用總線”上,每一個伺服驅動器各有獨立的電源。
驅動交流電伺服驅動器

在伺服驅動器內交流電供應的電流,驅動電流從主電源流向動力轉換級。
再生交流電伺服驅動器

在伺服驅動器內交流電供應的電流。在再生(剎車)上,電力從動力轉換級反向流回直流總線。
“反向”的動力會儲存總線電容和部分的跳閘電壓。分流器會開啟并耗散反向功率。主電源并未提供動力。
驅動和再生交流電伺服驅動器

兩個交流電伺服驅動器,一個驅動并消耗主電源供應的電力,另一個則在內部再生并耗散反向功率。
在高動態、極低摩擦、高速升減速、高傳送量的先進的機械上,反向功率可達機械軸上總功耗的2%- 5%。
在直流共享總線上,所有驅動器都連接上同一個直流總線,而再生反向功率則用來驅動其他機械軸。

其優點為:
*不需要內部耗散反向功率
*驅動器不需要散熱,因此不需要額外的冷卻裝置,如更大的散熱風扇等。
說明:
散熱是通過常見的分流器操作完成,所散的熱通常比PWM 橋所散的熱高更多。
*主電源電力消耗較少。
*需要整流成直流電壓的交流電更少。交流電整流是熱生成的一個大來源,這會大大地降低效率。
在多軸機械上所節省的能耗可達>5%。
在比較極端的情況上,如“張力控制”(卷繞-放卷機),節能的情況甚至可達>80%。
埃莫的Tambourine(TAM)是以“共享直流總線”方式設計的緊湊型電源,用來為多重 伺服驅動器供應電力。
怎樣才是“伺服驅動器的供電”?
伺服操作的本質要求電源具備特定的特色才行。在大多數的情況下,這些電源是單相或三相的交流電,“直接與主電源連接”或通過獨立的變壓器再連接主電源。
伺服操作需要的電壓電源必須穩定、簡單、能滿足“瞬時”高功率需求,并處理往復電機的動力(4個象限)。
此外,供電必須耐受“惡劣”的操作環境:電壓不穩、高脈沖、瞬態、突發、電磁干擾、高機械振動和機械沖擊、極端的溫度、高濕度等。
TAM就是專為應付這些特別的“艱難”情況需要而設計出來的產品,它有兩個主要的“功能性伺服”任務:
*供應驅動伺服驅動器直流電壓總線所需的直流總線電壓
*自電機和機械負載“吸收”所再生/剎車的功率
要實現上述目標,TAM發揮以下的功能:
*將交流電壓整流成直流總線電壓
*作為雙向“能量儲庫”以滿足伺服系統持續或突發的功率尖峰需求
*并聯穩壓器用以吸收從負載而來再生的或剎車的動力
*突波電流限制器
*高頻電流紋波“吸收器”
*過濾往復伺服驅動器的電磁干擾
*線電壓瞬態保護
*安全

圖一:伺服驅動器的電源供應簡圖
“共享直流電總線”的優點
*共享資源。伺服應用電力消耗的本質就是無數次功率升降,需要瞬時的高功率尖峰,所需的平均功率則非常低。在“交流電公用總線”上,每一個伺服驅動器的供電段必須被設計成能滿足尖峰功率需求。相反地,通過“共享直流電總線”,平均/總瞬時電耗則低得多。
“共享直流電總線”的其中一個優點就是共享的并聯穩壓器。伺服操作有一個特色就是短而劇烈的剎車或換向。既然驅動器同時全部再生動力返回直流總線很少見,一個“共享的”并聯穩壓器就可以同時服務多個伺服驅動器。而在“公用交流電”的情況,每一個并聯穩壓器必須夠大才能吸收電機再生的動力,而且無法得到周圍其他并聯穩壓器的支持。因此,就造成了多余并聯穩壓器的浪費。
在很多伺服應用上,當一個伺服驅動器剎車時,其他的則處于“電機驅動”狀態(耗電)。共享一個直流電總線則甚至不需要啟動并聯穩壓器,就能讓能流從剎車驅動過渡到電機驅動,因此減少了再生過程中相當的熱耗散。而在“卷繞-放卷”應用的情況,甚至可以減少超過80%的能耗。
*避免重復。 連接上交流電的任何電源都需要同樣的必備“成分”:橋式整流器、電壓抑制器、突波電流限制器、電磁干擾電路、并聯穩壓器、電容。在“共享直流電總線”(TAM電力網絡)上,只需要一組就夠了;但在“交流電公用總線”上,每一個驅動器都必須搭配所有這些必備元件才行。
*較少的電氣元件。安全規范要求每一個連接上主電源的負載必須串聯一個保護元件。因此在交流電的情況,每一個連接上交流電的部分都必須帶有至少一個斷路器。在很多情況下,為了機械的安全操作起見,也需要安裝電流接觸器。
直接驅動
大多數的標準伺服電機都設計具有1500到3000 RPM的轉速。在很多情況下,最大的應用速度是較低的。要“調整”應用的最大速度有2個主要方式:
*機械減速裝置(齒輪)
*直接驅動伺服電機
第一個“調整”方式添加了一個機械級進去,這會減少電機-齒輪單元的壽命,還給系統增加了不準確性(背隙)、增加成本,并降低效率。一個一級減速器(減速比達10:1)有 ≈80%的效率(優質的減速器可達將近90%)。
第二個“調整”是一個高性能的解決方案,但成本很高,在很多情況下是難以負擔的。
埃莫就推出了一個經濟實惠的高性能直接驅動方案。
埃莫的方案由以下部分組成:
*標準步進電機
*高分辨率的編碼器
*高性能表現的步進伺服驅動器
相較于DDR,步進DDR方案的成本低了50% -60%,因而鼓勵了大家從減速器的方案轉而采用直接驅動的方案,因此消除了機械減速器所帶來的能源浪費。
埃莫的步進DDR精度最高達20 NM。
步進伺服直接驅動
埃莫結合了低成本的標準步進電機和直接驅動機制的方法,為各種應用需求創造了最佳、最好的性能表現。一個在封閉控制回路結構中運作的低成本微型步進電機,取代一個昂貴的直接驅動電機,而不會對運動表現的質量造成任何減損。以高控制轉矩旋轉一個不平衡的負載以及在精準的超低轉速下,都證明了它有極佳的運動定位與速度準確性(圖二)。運用獨特的信號調節運算法,對一個沒有振動的不平衡變動負載進行運動-穩定操作,結果表現非常迅速而精準。這讓堵轉和超低運作速度的高保持轉矩得以實現。運用先進排程的和固定的濾波器、增益排程法,和其他內置的高端伺服控制功能,來克服不必要的機械缺陷所造成的影響,伺服系統的性能表現獲得了改善。通過多種補償方法,它消除了齒槽效應。

圖二:慢速運動下的低速紋波:在0.1RPS 時,速度紋波不到1%。
埃莫Gold系列驅動器中具備的標準化高性能伺服控制功能,是這個解決方案的關鍵。
*高電流動態范圍分辨率(比例為1:1000)。
*3個控制回路(定位、速度和電流1:1:1 - 60uSec)最高達60uSec的高采樣速率 。
*高控制帶寬,大部分用于電流和速度回路 。
*用于快速而順暢穩定的獨特增益排程法。
*大量排程和非排程雙二價高階濾波器,它們幾乎可以被安排在伺服控制回路中的任何環節上。
*特殊運算法,如用于無振動快速運動-穩定的信號調節(圖三)。
*非線性補償法。
*還有更多…

圖三:快速的運動和穩定系統響應

圖四:運用信號調節運算法的快速運動和穩定情況
演示
一個不平衡的不銹鋼負載,重500 克,以金屬棒直接耦合至步進電機的旋轉軸上。先進的封閉伺服控制回路在負載因金屬棒旋轉角度的關系而重量產生變化的同時,維持了準確的超低轉速。運用20-bit絕對式串行編碼器分辨率,來控制低速下的高定位準確性和精準的金屬棒運動。因為金屬棒旋轉速度的關系,金屬棒的旋轉角度會出現變化。運用高帶寬電流和速度控制回路,可達到非常精準運動速度,最慢可達0.01RPS(轉/秒)。在0度和180度時(金屬棒垂直),外轉矩T(ext)為0;而在90度和270度時(金屬棒水平),外轉矩T(ext)有最大值。而在介于中間的角度時,因為金屬棒的恒長、重量(500克)、重力(9.81 m/s2)和旋轉金屬棒角度 (∝)的正弦函數,外轉矩會出現變化。
應用范例
由于近年來對機械工具生產力、準確性和動態性能表現的要求愈來愈高,直接驅動的技術興起成為達到這些目標的理想方法。尤其是低成本步進電機和先進伺服控制的結合,證明了能顯著提升機械工具的性能表現。除了提供高動態性能表現外,埃莫的驅動器和步進電機能降低機械成本、簡化機械設計,也降低維護的需求。
以直接驅動的方式來操作步進電機省去了齒輪箱的需求,或其他機械傳輸元件的需求,還能將有效載荷直接耦合到驅動器上。電機就能在沒有背隙的情況下,以高動態響應來驅動。
擁有相對來說大量磁極對數的步進電機,能在堵轉時產生非常高的轉矩;高動態剛性;同時讓電機能達到非常順暢的速度調節與低紋波的情況。
若機械工具依據必要的精度和張力設計建造,同時系統也集成了高性能表現的伺服控制系統的話,步進電機的好處才能實現。
直接耦合電機驅動的旋轉級帶來更高的可靠性和精度,適合半導體晶片檢查上超薄的情況和其他相關的應用。直接驅動的技術省去了蝸輪這種傳統旋轉級的需求,提供更大范圍的轉速,更優異的可靠性,并為一些應用領域強化了定位敏感度,如精密量測、半導體晶片檢查、微機器人等等。
這種系統的應用多不勝數,幾乎所有工業性機械部門都可以找得到(半導體、鉆鑿業、CNC電腦數控機床、包裝等)。
另一個適合的應用范例就是方位角/仰角顯示、雷達、追蹤和其他類似的應用系統。對這種系統的適當高端操作來說,低跟蹤速度下的高精度和高準確性是必要的性質。




 投訴建議
投訴建議
提交

Elmo Motion Control 推出新一代運動控制器 Titanium Maestro
精彩直擊!Elmo帶您打卡慕尼黑電子生產設備展,解鎖智造新未來!
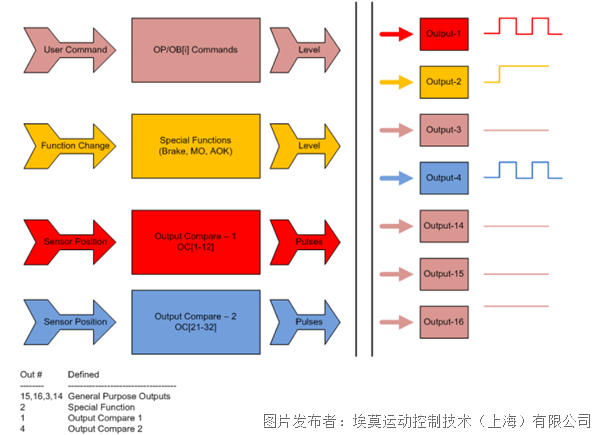
小莫科普No.9 | 起底Elmo輸出比較(OC)功能

揭秘春晚"機甲舞王"運動控制的秘密!微型伺服驅動器如何賦予機器人靈魂般的靈動?

揚帆正當時 | Elmo為OEM制造商“出海”加速